机器人制作与创新 1 创新一 机器人写字 机器人在我们的生活中应用越来越广泛,例如家务机器人、表演机器人、消防机器人、医疗机器人等
在写字机器人的制作与创新过程中涉及到了单片机、电子技术、传感器、自动控制、电机技术、机械传动机构等相关知识
利用单片机的可编程性、易控制、搭接电路简单、工作稳定、性能优越、价格低廉等特点,结合检测传感技术,综合应用到控制系统中,使写字机器人实现智能化
该写字机器人可用作教师的辅助教学设备和机器人的实践设备等
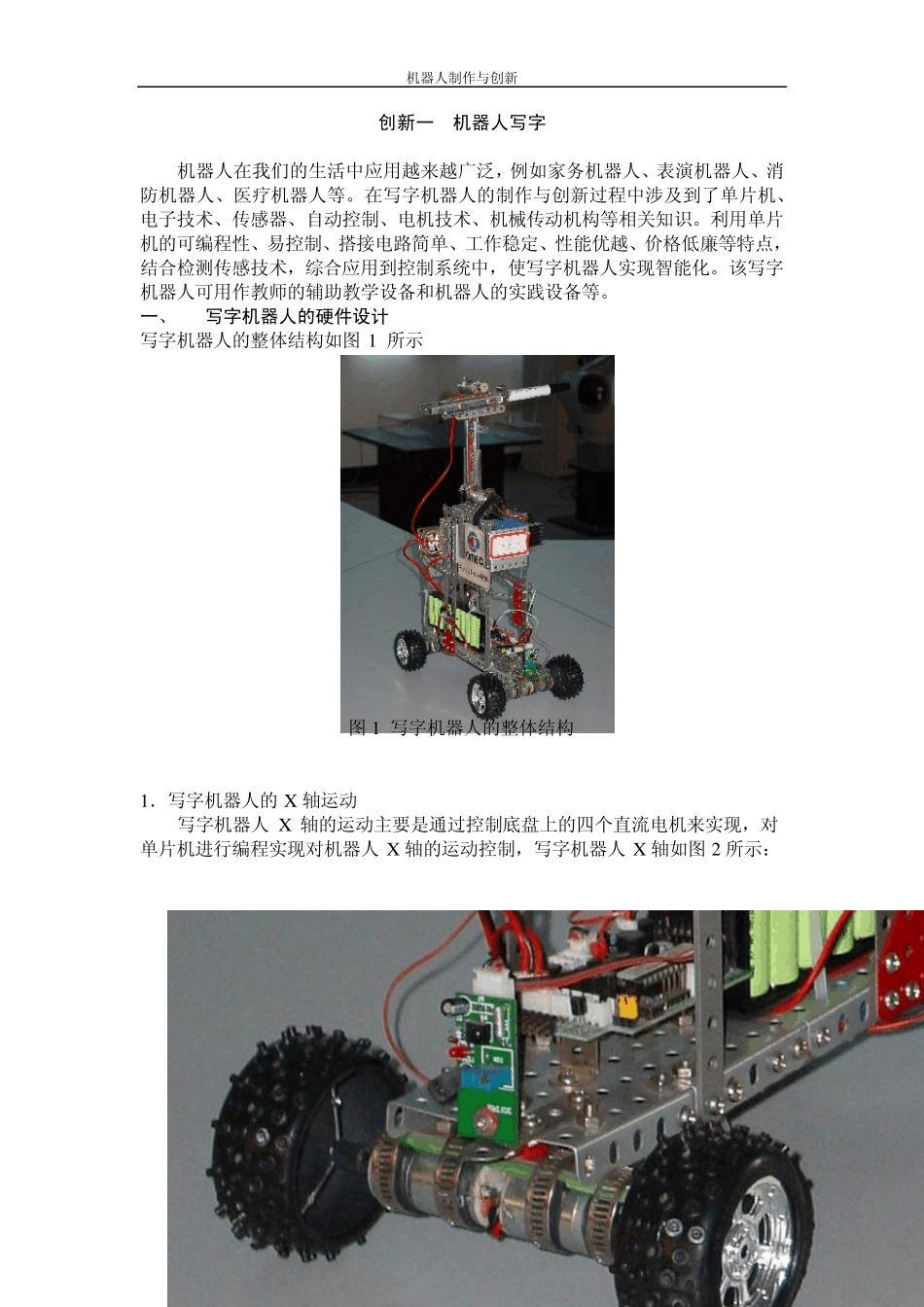
一、 写字机器人的硬件设计 写字机器人的整体结构如图 1 所示 图 1 写字机器人的整体结构 1.写字机器人的X 轴运动 写字机器人X 轴的运动主要是通过控制底盘上的四个直流电机来实现,对单片机进行编程实现对机器人X 轴的运动控制,写字机器人X 轴如图 2 所示: 图 2 写字机器人X 轴运动 机器人制作与创新 2 2.写字机器人Y 轴的运动 写字机器人Y 轴的运动采用的抽屉的滑轨配合齿轮齿条传动机构来实现的,具体的硬件的搭接方法如图3 所示: 图3 Y 轴的运动 单片机通过控制电机转动带动齿轮和齿条的运动来实现Y 轴的上升和下降,从而实现“竖”笔画的书写 3.写字机器人Z轴的运动 写字机器人Z轴的运动采用的方法同 Y 轴的方法是一样的,Z轴的运动主要实现笔的进笔和出笔
具体的硬件搭接方法如图4 所示: 图4 Z轴的运动 二、程序设计 1.写字机器人编程语言的选择 机器人软件开发平台可以使用LOGO语言、QBASIC语言、汇编语言、C语言四种编程语言,而LOGO语言、QBASIC语言和C语言这三种语言的编程相对比较简单,但是占用程序存储空间比较大,而要在黑板上写出“北京仪表学校”六个字需要的程序存储空间比较大,而单片机只有 4K的程序存储空间,所以这三种语言是不能选择的
最终写字机器人采用的是汇编语言,虽然汇编语言的编程相机器人制作与创新