哈 尔 滨 理 工 大 学 机电与汽车工程学院 机 器 人 技 术 及 应 用 实 训 报 告 班 级 : 姓 名 : 学 号 :...
机器人技术复习提纲 一.简答题 1. 机器人内部传感器与外部传感器的作用是什么,它们都包括哪些? 答:内部传感器主要用于检测机器人自...

机器人手指成品图如上所示 组装教程如下: 组装大手指零件,使用 M2X3 的螺丝,M2X7 的铜柱 组装其他手指零件螺丝使用 M2X3,M2X7 ...

1 机器人手术系统辅助实施心脏手术技术规范(2012年版) 一、机器人手术系统辅助实施心脏手术适应证和禁忌证 (一)适应证。 1.冠状动...

机器人快车编程入门培训

机器人快车说明robotexp
机 器 人 设 计 开 发 中 的 三 大 挑 战 目 录 1. 更 好 的 电 池 2. 更 好 的 执 行 机 构 3. 工 业 级...
机器人实验指导用书

机器人导论结课作业 水下机器人发展现状及发展前景简介 综述: 由于近几年科技的发展尤其是近几年仿生仿生生物学的发展,为水下机器人的...
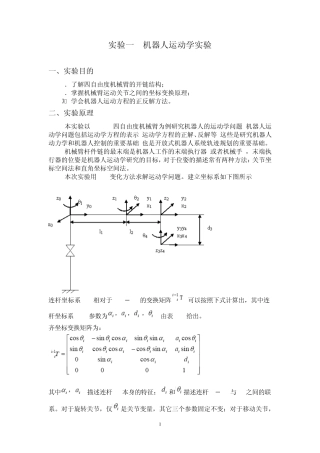
1 实验一 机器人运动学实验 一、实验目的 1.了解四自由度机械臂的开链结构; 2.掌握机械臂运动关节之间的坐标变换原理; 3. 学会...
机 器 人 单 机 安 全 操 作 规 程 2 块 60cm*90cm 1. 机 器 人 操 作 人 员 必 须 经 过 专 业 培 训 , ...
华中数控 1 / 2 8 工 业 机 器 人 理 实 一体化实 训基地 教学实 训车间建设 技 术 方 案 华中数控 2015 年 04 月...

第七章 机器人动力学的凯恩方法 7 .1 引言 机器人动力学凯恩方程方法是建立在凯恩动力学方程基础上的,因而本章首先介绍凯恩动力学方...
电气工程与自动化系 1 上海英集斯机器人学习心得体会 电气工程与自动化系 王文川 2013 年6 月18 日有幸参加了上海英集斯自动化技术...

产生的结果如下: 机械臂自由度减少,从而无法实现某些运动 某些关节角速度趋向于无穷大,导致失控 无法求逆运算 当机器人...

外文翻译 外文资料: Robots First, I explain the background robots, robot technology development. It should be said...

外文翻译 外文资料: Robots First, I explain the background robots, robot technology development. It should be said...
第一章 阿西莫夫提出“机器人三原则”:1 机器人不得伤害或由于故障而使人遭受不幸; 2 机器人应执行人们下达的命令,除非这些命令与第...
机器人基础考试试题重点

机器人基础编程