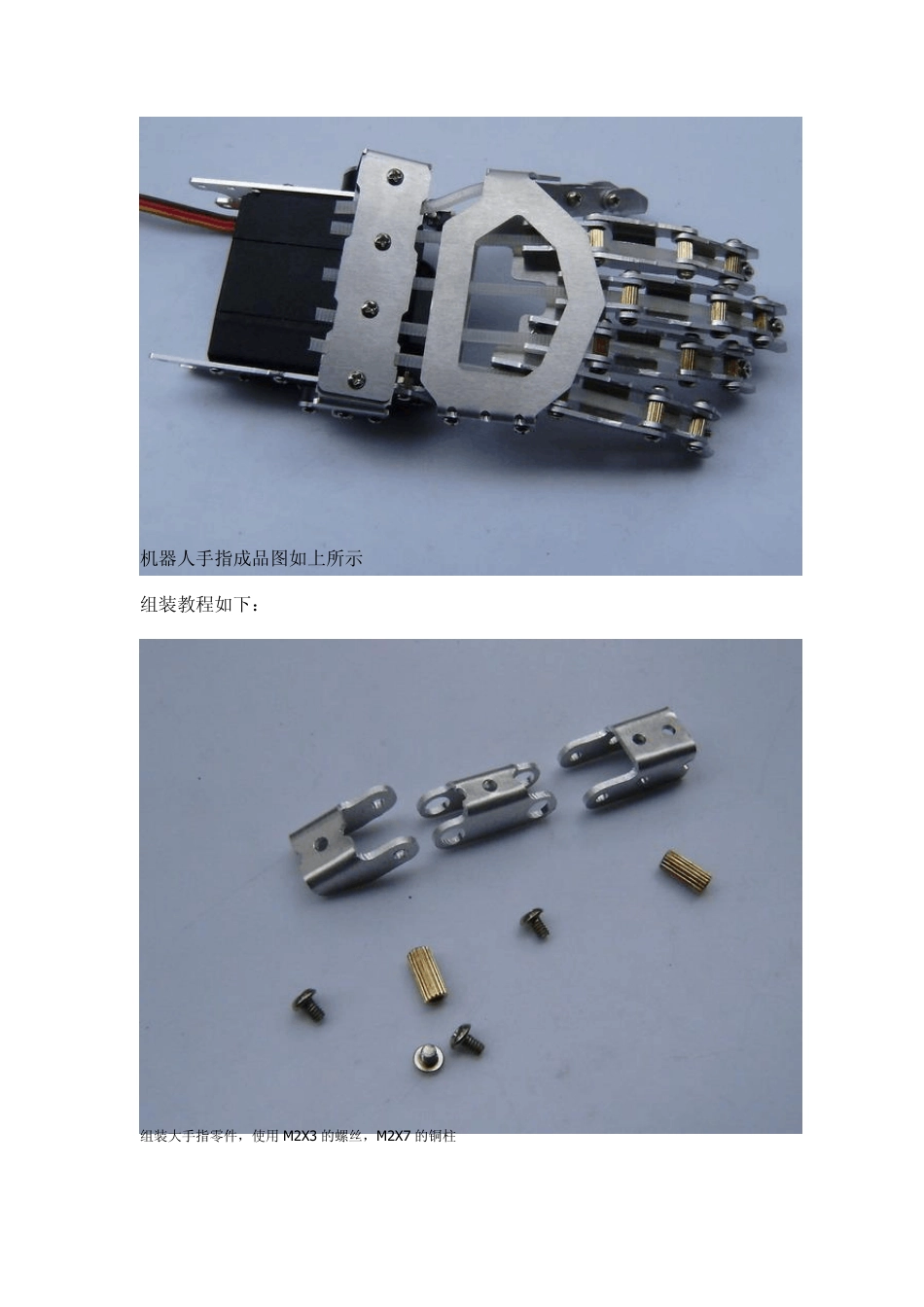
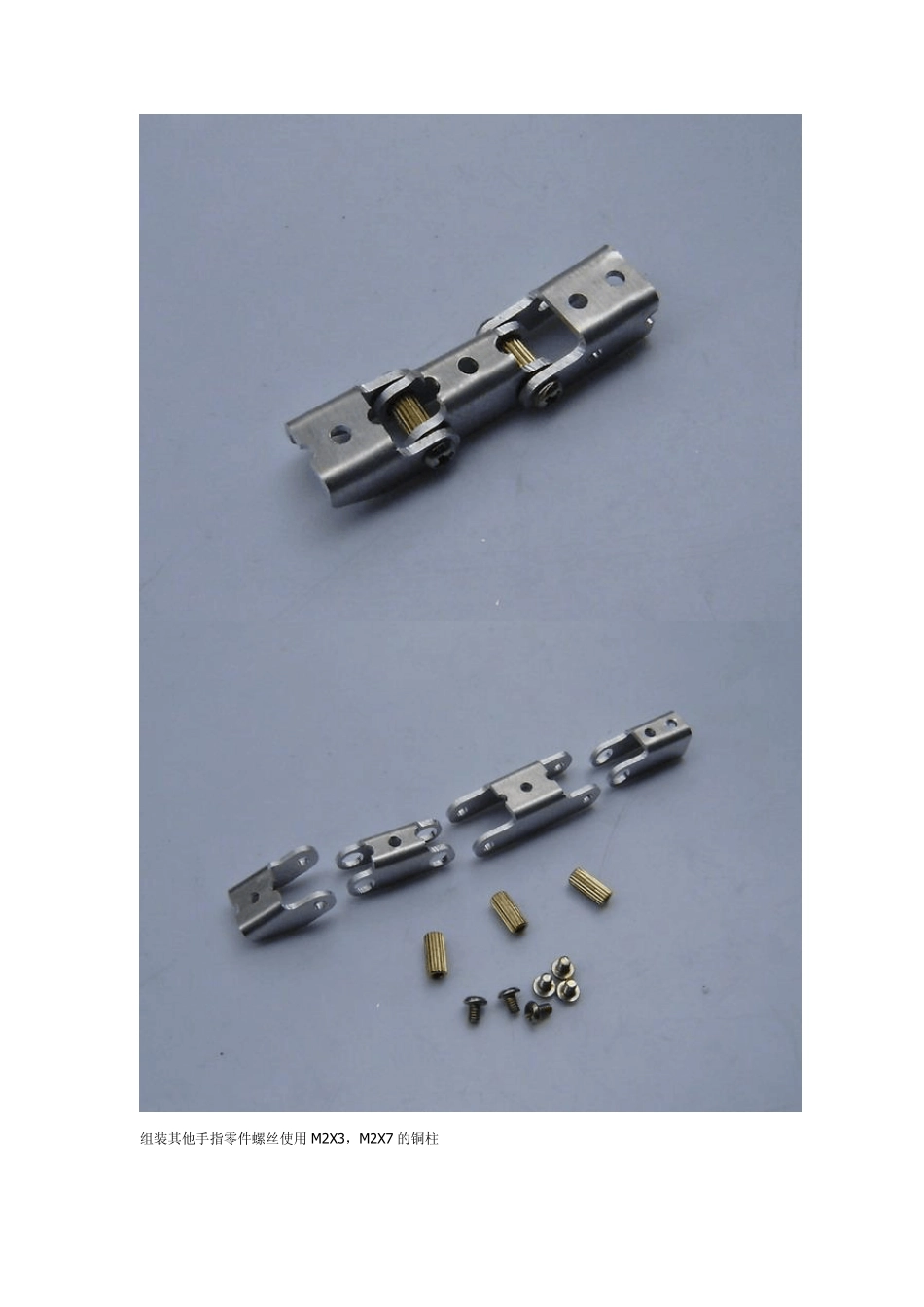
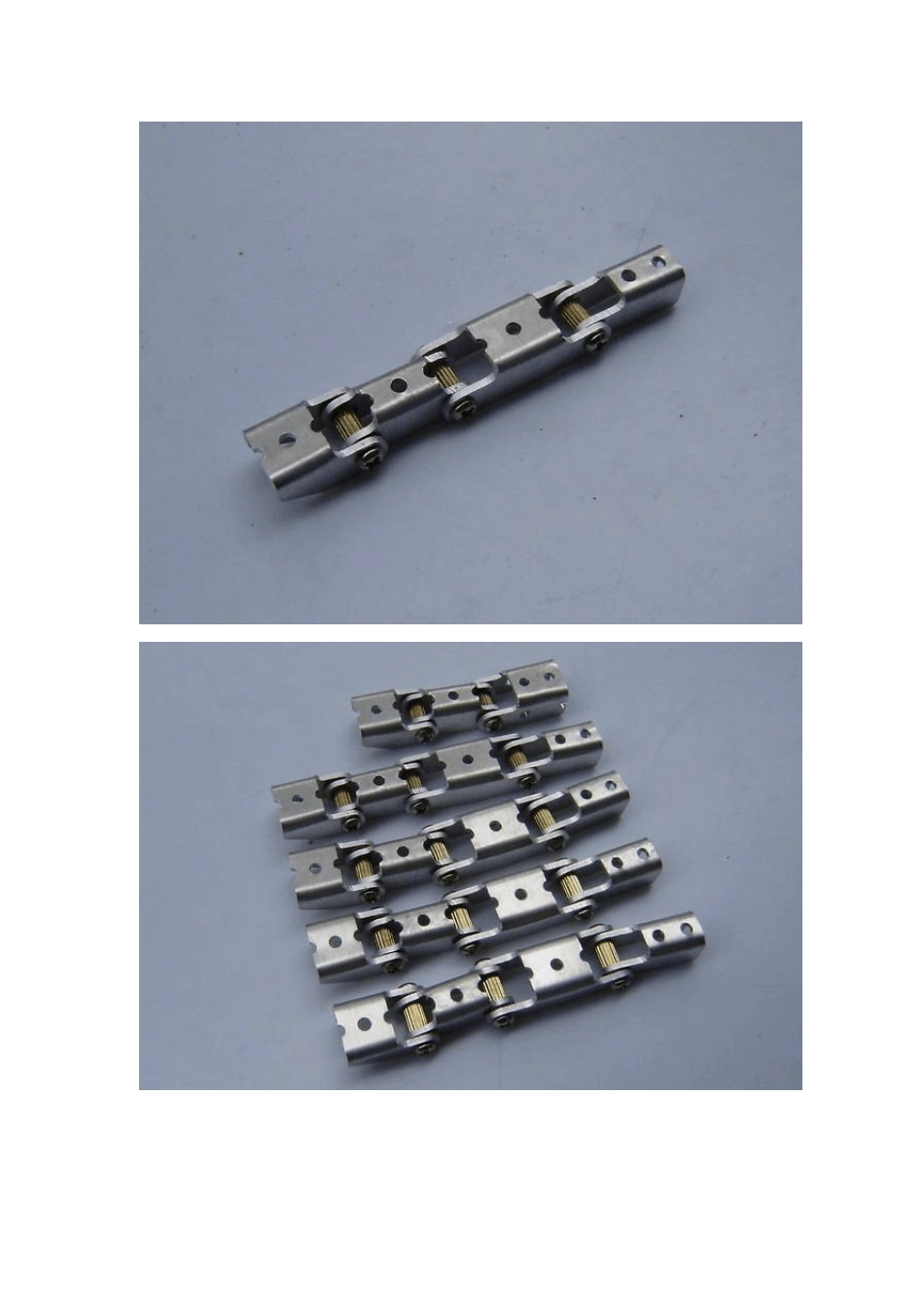
机器人手指成品图如上所示 组装教程如下: 组装大手指零件,使用 M2X3 的螺丝,M2X7 的铜柱 组装其他手指零件螺丝使用 M2X3,M2X7 的铜柱 组装手指跟手心零件,使用M2X5 普通螺丝、M2 的螺母 套入手指拉线,丝口朝下
指尖使用 M2X4 的自攻螺丝 注意最新改进版指尖使用的是 M2X4 或者 M2X5 的自攻螺丝,并非图示的 M2 螺丝+螺母,改进的好处更便于手指的扎带的安装
最新改进版指尖使用的是M2X4 或者M2X5 的自攻螺丝 安装手背零件,左右各使用2 颗 M2X4 自攻螺丝, 组装手腕连接片,使用M2X5 的自攻螺丝,这个时候舵机必须先处于重置状态下即舵机板发送P1500 上正舵盘,保证舵机在P1500 重置状态下安装舵盘并保证舵盘其中一个孔位跟舵机保持正90° 连接手指 跟手腕零件,使用M2X5 普通螺丝、M2 螺母 安装U 架跟手指拉线压板,螺丝先不要拧死保证压板跟U 架之间一定的空隙 先把手指拉线套入U 架跟压板中间然后再把U 架卡到舵盘上面 固定U架前后三颗M2X4自攻螺丝,并安装前后舵盘M3固定螺丝
然后把U架往前推,在手指拉线的推动下保证手指再这个时候是接近伸直的状态下,注意保证大手指扎带比其他 4跟手指松一些,即扎带多往前推一些,然后拧死 U架上面的M2X5的螺丝 把U架推回来舵机跟U架保证90°的时候拳头是握紧状态,剪掉多余的手指拉线,此状态就是舵机重置后即舵机板发送 P1500的手指状态,大手指在食指之上