Matlabsimu linkPID Controller PID 控制器 模拟连续或离散时间的PID 控制器 库 连续,离散 说明 在Simulink 模型实现一个连续或离散时间控制器(PID,PI,PD,P,I)
PID 控制器的增益是可调的手动或自动方式
自动调整需要 Simulink 控制设计软件(PID 调谐器或SISO设计工具)
PID Controller block 块的输出是输入的加权总和的信号,输入信号的积分,和输入信号的导数
权重比例,积分和微分增益参数
一阶极点滤波器的微分动作
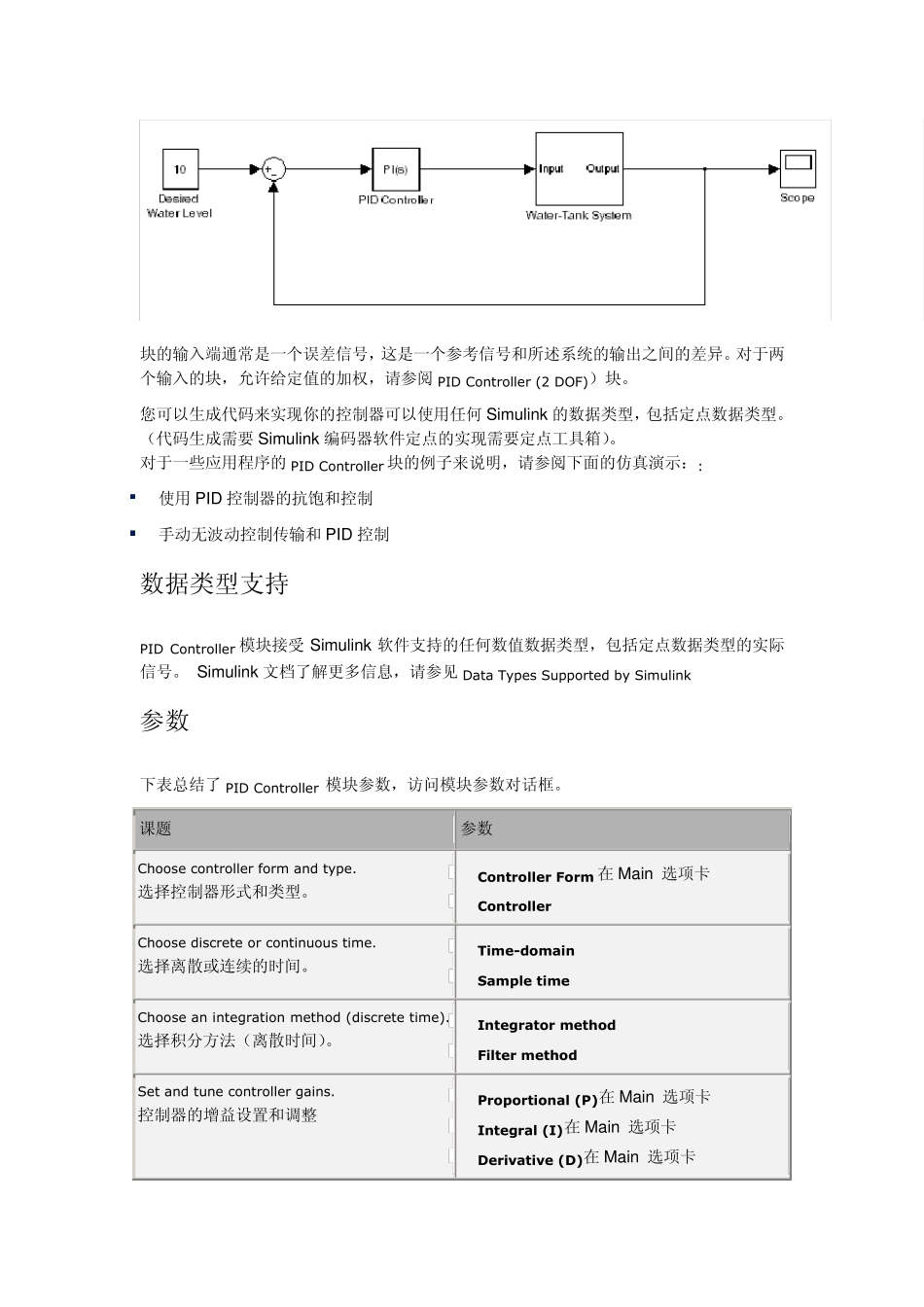
PID Controller 模块的配置选项包括: 控制器的类型(PID,PI,PD,P,或我) 控制器形式(并行或理想) 时域(连续或离散) 初始条件和复位触发 输出饱和的限制,并内置抗饱和机制 无波动地控制传输的信号跟踪和多回路控制 在一个公 共 执 行 方 式 中 ,PID 控制器块 的前 馈 路 径 中 的反 馈 环 路 工 作 : 块的输入端通常是一个误差信号,这是一个参考信号和所述系统的输出之间的差异
对于两个输入的块,允许给定值的加权,请参阅 PID Controller (2 DOF))块
您可以生成代码来实现你的控制器可以使用任何 Simulink 的数据类型,包括定点数据类型
(代码生成需要 Simulink 编码器软件定点的实现需要定点工具箱)
对于一些应用程序的PID Controller 块的例子来说明,请参阅下面的仿真演示:: 使用 PID 控制器的抗饱和控制 手动无波动控制传输和PID 控制 数据类型支持 PID Controller 模块接受 Simulink 软件支持的任何数值数据类型,包括定点数据类型的实际信号
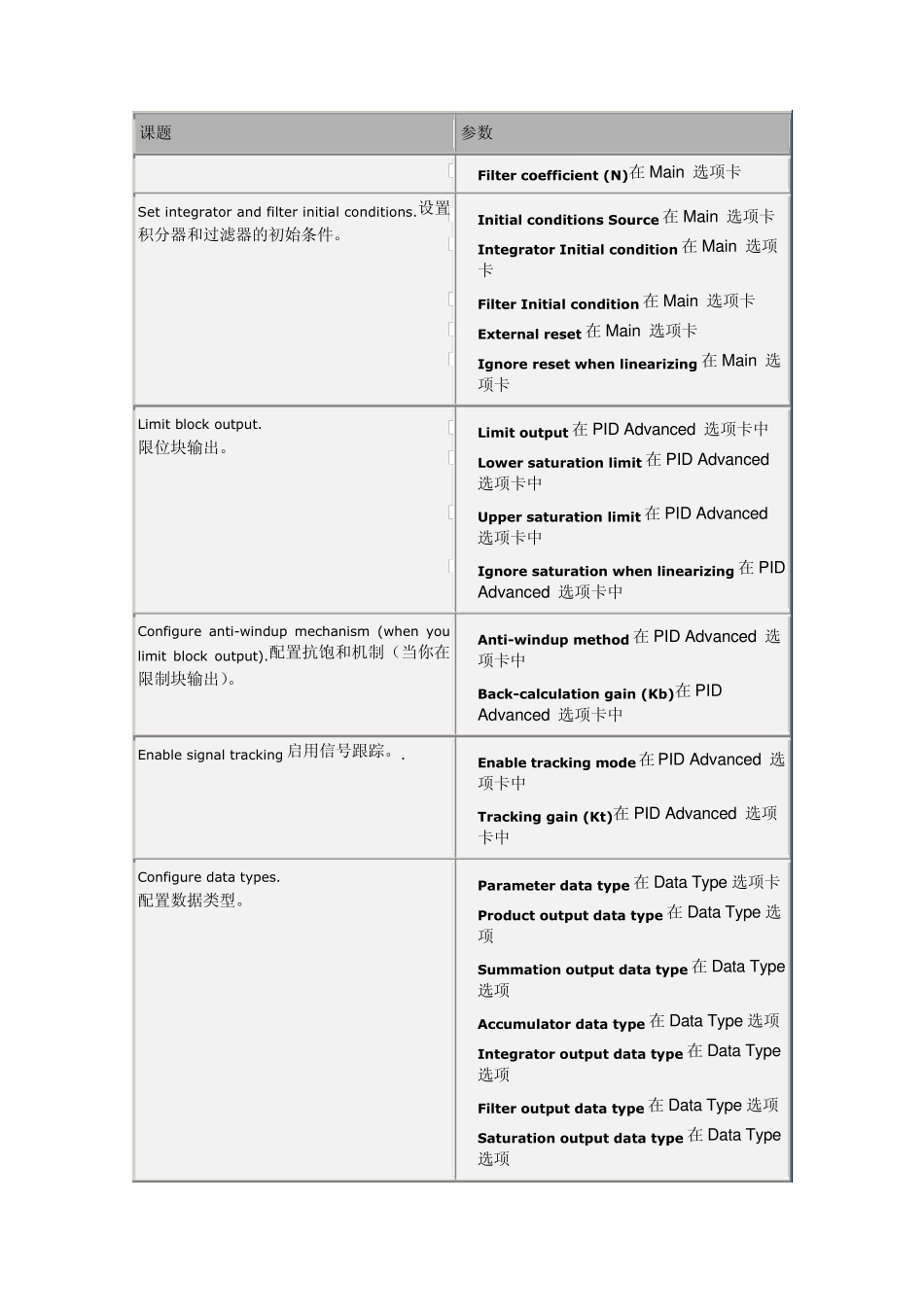
Simulink 文档了解更多信息,请参见 Data Types Supported by Simulink 参数 下