1 课题一 认识光机电一体化实训考核装置 一、实训目的 1.了解 YL-235A 光机电一体化实训考核装置的组成
2.掌握电源模块、按钮模块、PLC 模块、变频器模块的作用
3.掌握上料机构、搬运机构、传输分拣机构的作用
二、器材、工具与仪表 1.YL-235A 光机电一体化实训考核装置
2.螺钉旋具、尖嘴钳、斜口钳、剥线钳、钟表起、内六棱扳手、水平尺等
3.万用表等
三、实训步骤 1.认识YL-235A 光机电一体化实训考核装置,如图 1 所示
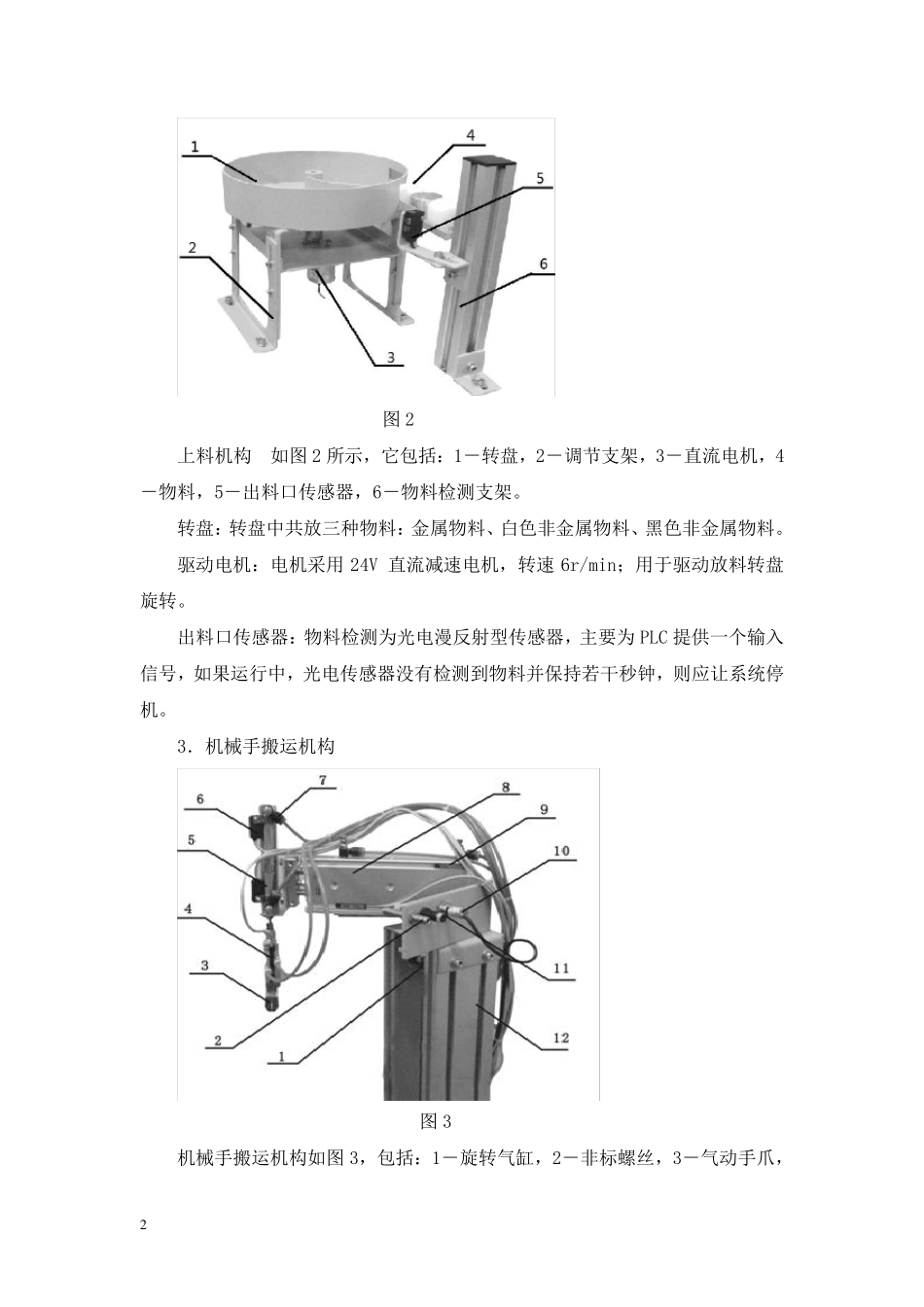
图 1 2.上料机构 2 图2 上料机构 如图2 所示,它包括:1-转盘,2-调节支架,3-直流电机,4-物料,5-出料口传感器,6-物料检测支架
转盘:转盘中共放三种物料:金属物料、白色非金属物料、黑色非金属物料
驱动电机:电机采用 24V 直流减速电机,转速 6r/min;用于驱动放料转盘旋转
出料口传感器:物料检测为光电漫反射型传感器,主要为 PLC 提供一个输入信号,如果运行中,光电传感器没有检测到物料并保持若干秒钟,则应让系统停机
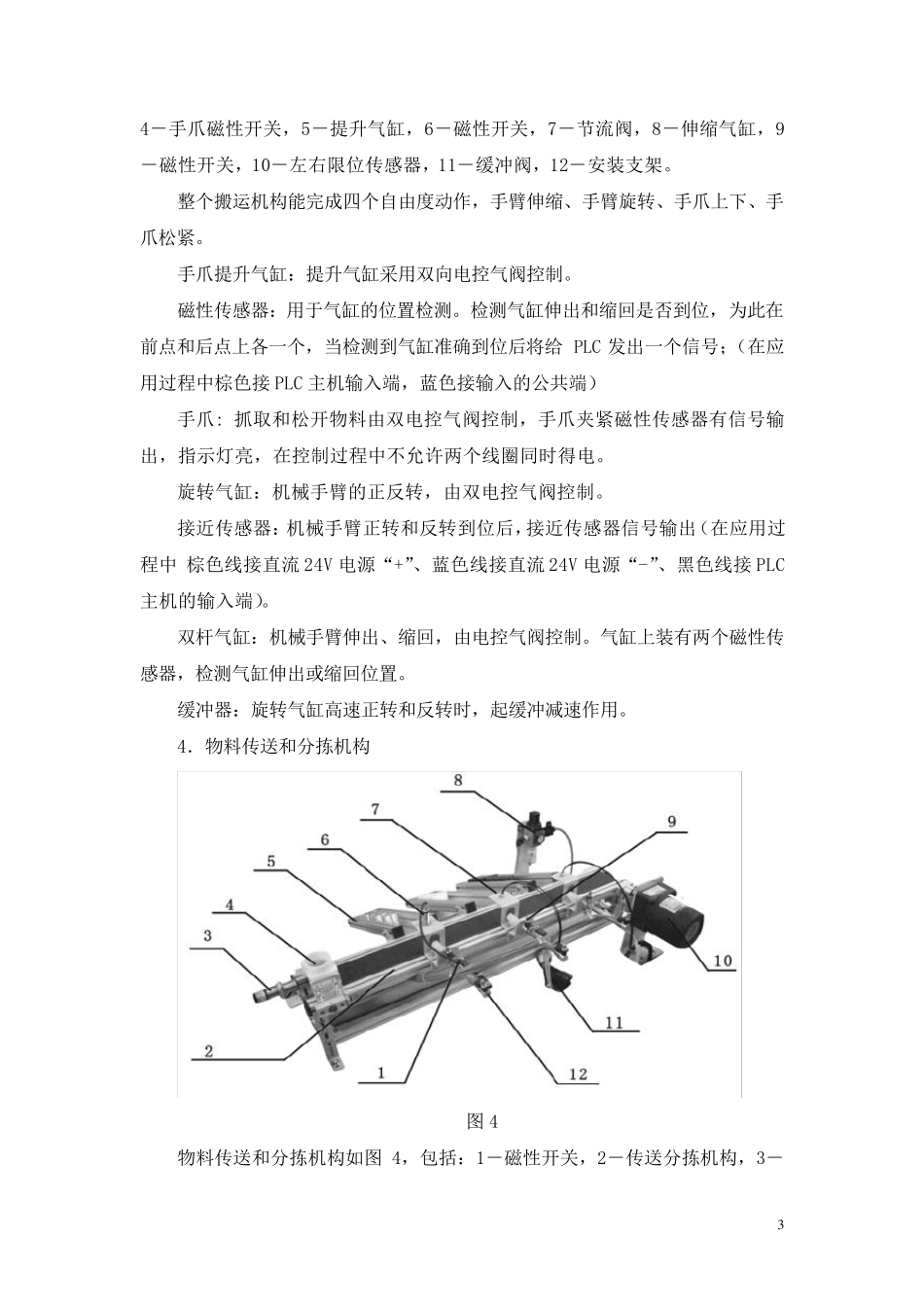
3.机械手搬运机构 图3 机械手搬运机构如图3,包括:1-旋转气缸,2-非标螺丝,3-气动手爪, 3 4- 手 爪 磁 性 开 关 , 5- 提 升 气 缸 , 6- 磁 性 开 关 , 7- 节 流 阀 , 8- 伸 缩 气 缸 , 9- 磁 性 开 关 , 10- 左 右 限 位 传 感 器 , 11- 缓 冲 阀 , 12- 安 装 支 架
整 个 搬 运 机 构 能 完 成 四 个 自 由 度 动 作 , 手 臂 伸 缩 、 手 臂 旋 转 、 手 爪 上 下 、 手爪 松 紧
手 爪 提 升 气 缸 : 提 升 气 缸 采 用 双 向 电 控 气 阀 控 制
磁 性 传 感 器 : 用 于 气 缸 的 位 置 检 测
检 测 气 缸 伸 出 和