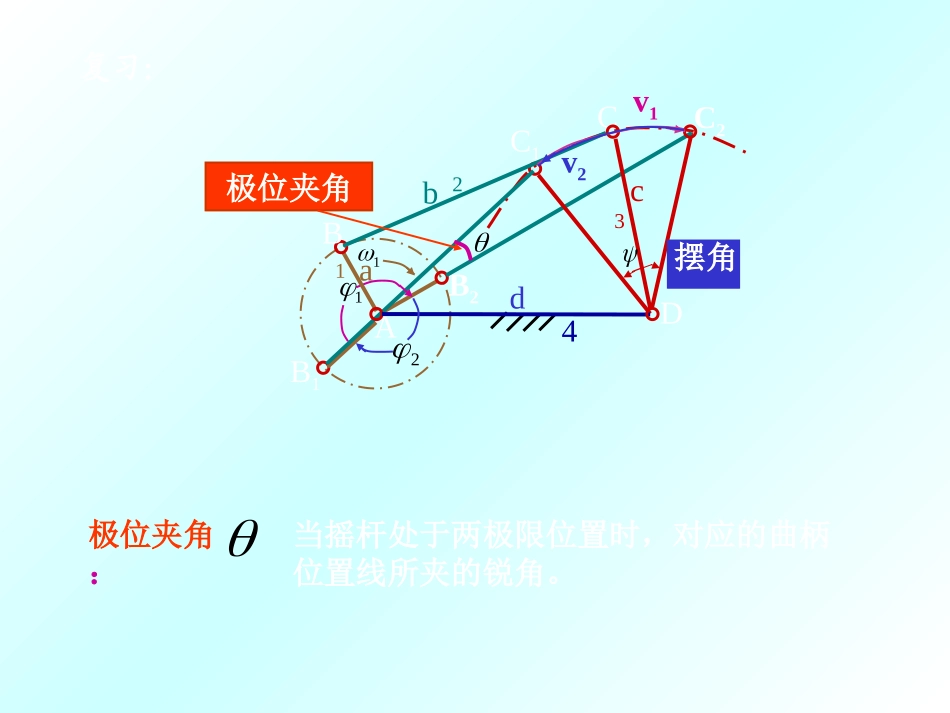
B2C2B1C1极位夹角:当摇杆处于两极限位置时,对应的曲柄位置线所夹的锐角
1A211C34BDabcd2摆角极位夹角v1v2复习:4
6平面四杆机构的设计与实例分析一个设计过程:由已知条件→设计出各构件尺寸已知条件:运动条件(如:从动件的运动规律)几何条件(如:杆的尺寸范围)动力条件(如:满足γmin>40)两类基本问题:实现给定运动规律:(位置、速度、加速度、行程速比系数K)给定行程速比系数以实现预期的急回特性、实现连杆的几组给定位置等
实现给定运动轨迹:要求连杆上某点沿着给定轨迹运动等
设计目标:根据给定的运动条件,选定机构的类型,确定机构中各构件的尺寸参数
设计方法:图解法、实验法和解析法等
图解法:利用几何作图原理求解;图解法比较简明易懂,求解快,手工绘图精度稍差;但计算机绘图已完全解决这一问题,其精度远远满足工程需要三种设计方法:解析法:利用和构建设计参数间的函数关系求解;可以使设计呈参数化,精度高,但比较繁杂,如今利用计算机(CAD)也使得解析法变得轻松和容易实验法:利用试凑和连杆曲线图谱等方法求解;实验法直观、迅速,可近似达到要求,常用作设计的预选平面四杆机构的图解法设计一、按照给定的连杆位置设计四杆机构AD此问题的本质是:已知活动铰链,求固定铰链(求活动铰链轨迹圆的圆心)
B1B2B3C1C2C3二按给定行程速度变化系数设计四杆机构已知:KlCD,,求:A的位置,并定出BCADABlll,,DB1B2AO90-90-(>1)(>1)C1C2AB=(AC2-AC1)/2BC=(AC1+AC2)/2AC1=BC-ABAC2=BC+AB180°(K-1)(K+1)θ=确定比例尺llADlBClABADlBClABl,,C1DB1C2B2AO90-90-曲柄滑块机构2aAB134CbvcHO90已知