摄像机标定实验 一、实验目的 1
掌握图像坐标系、摄像机坐标系和世界坐标系的定义及相互之间的变换关系,掌握摄像机透视投影原理及模型; 2
了解摄像机标定的意义,掌握基于自由移动平面靶标的摄像机标定原理; 3
了解摄像机镜头光学畸变模型,掌握摄像机镜头径向畸变校正原理和实现方法; 4. 学习使用MATLAB 工具箱进行摄像机参数标定,精度评价以及畸变校正
二、实验软件平台 MATLAB (R2014a,64bit),摄像机标定工具箱TOOLBOX_calib
三、实验内容 1
先用Au toCAD 或者图像编程制作一个方格棋盘黑白靶标,并用打印机打印在A4 纸上,贴在某个平整的物面上,然后用摄像机从多个角度拍摄靶标图像7至10幅
利用 MATLAB 工具箱 TOOL_BOX 对拍摄得到的图像进行摄像机标定,精度分析
四、实验步骤及结果 1
下载 MATLAB 摄像机标定工具箱 TOOLBOX_calib(2015 年 10 月 14 日更新),解压该工具箱
使用摄像机从不同角度拍摄9 幅方格棋盘黑白靶标的图片,将图片置于解压的工具箱文件夹内 3
打开 MATLAB 软件,将 MATLAB 的 path 设置为解压后的 TOOLBOX_calib 文件夹
在命令窗口输入 calib,弹出窗口,选择第一项 Standard 模式
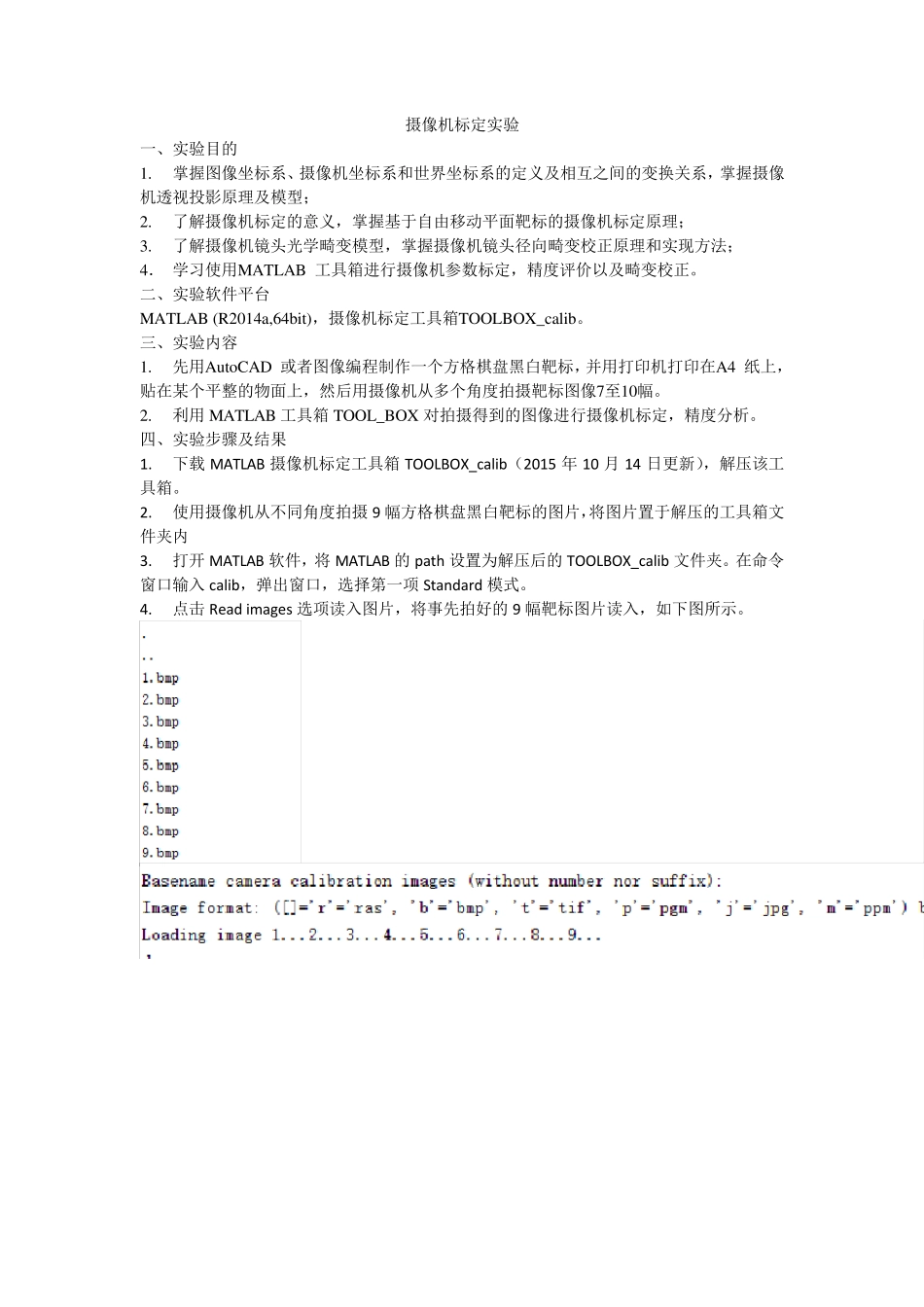
点击 Read images 选项读入图片,将事先拍好的 9 幅靶标图片读入,如下图所示
在提取图像进入程序后,我们要对图像提取角点,点击Extract grid corners,根据提示进行操作
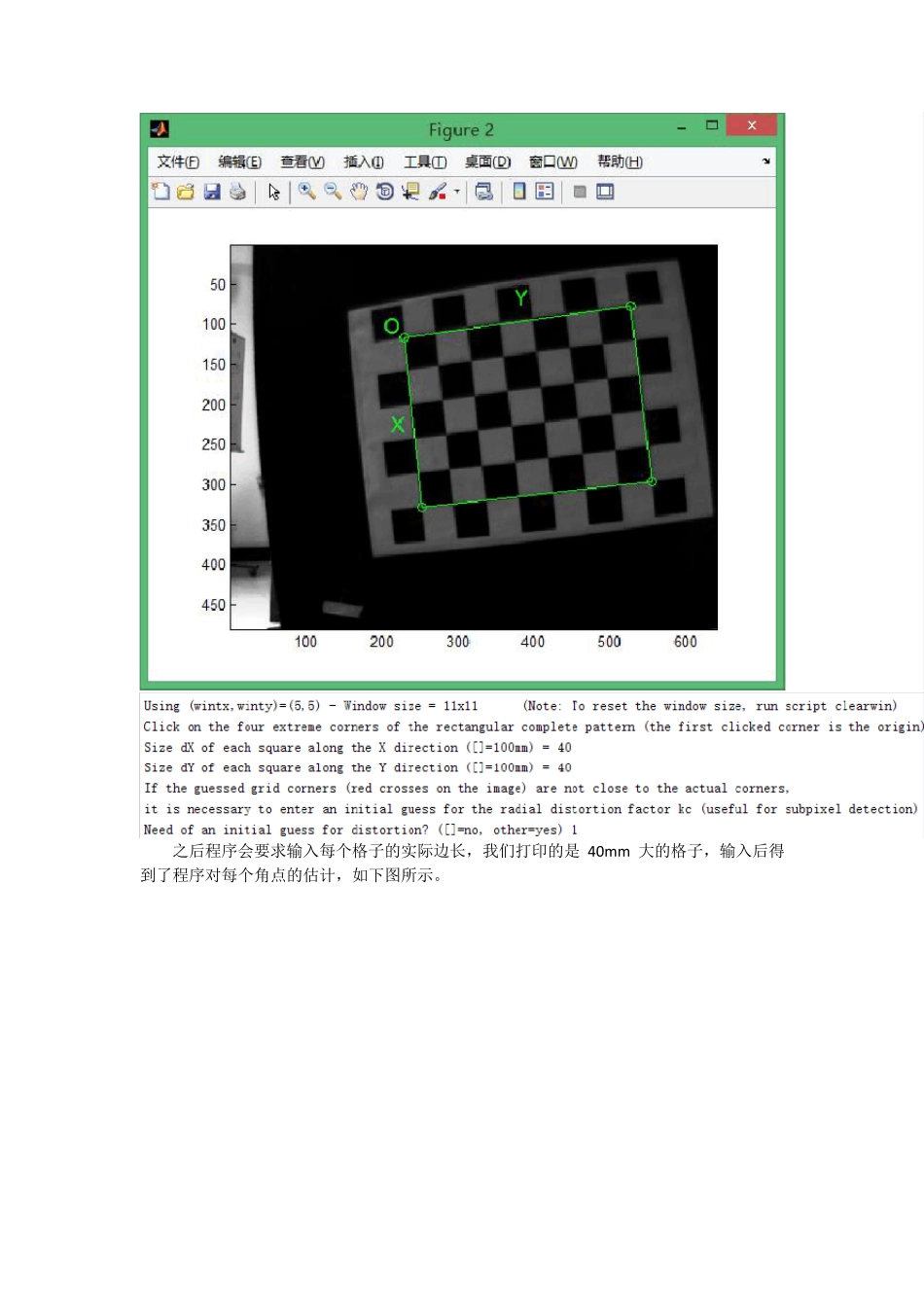
此时程序会弹出图像请用户标出角点,通过选取,得到了下图
之后程序会要求输入每个格子的实际边长,我们打印的是40m m 大的格子,输入后得到了程序对每个角点的估计,如下图所示
我们可以发现这张图上边的角点不