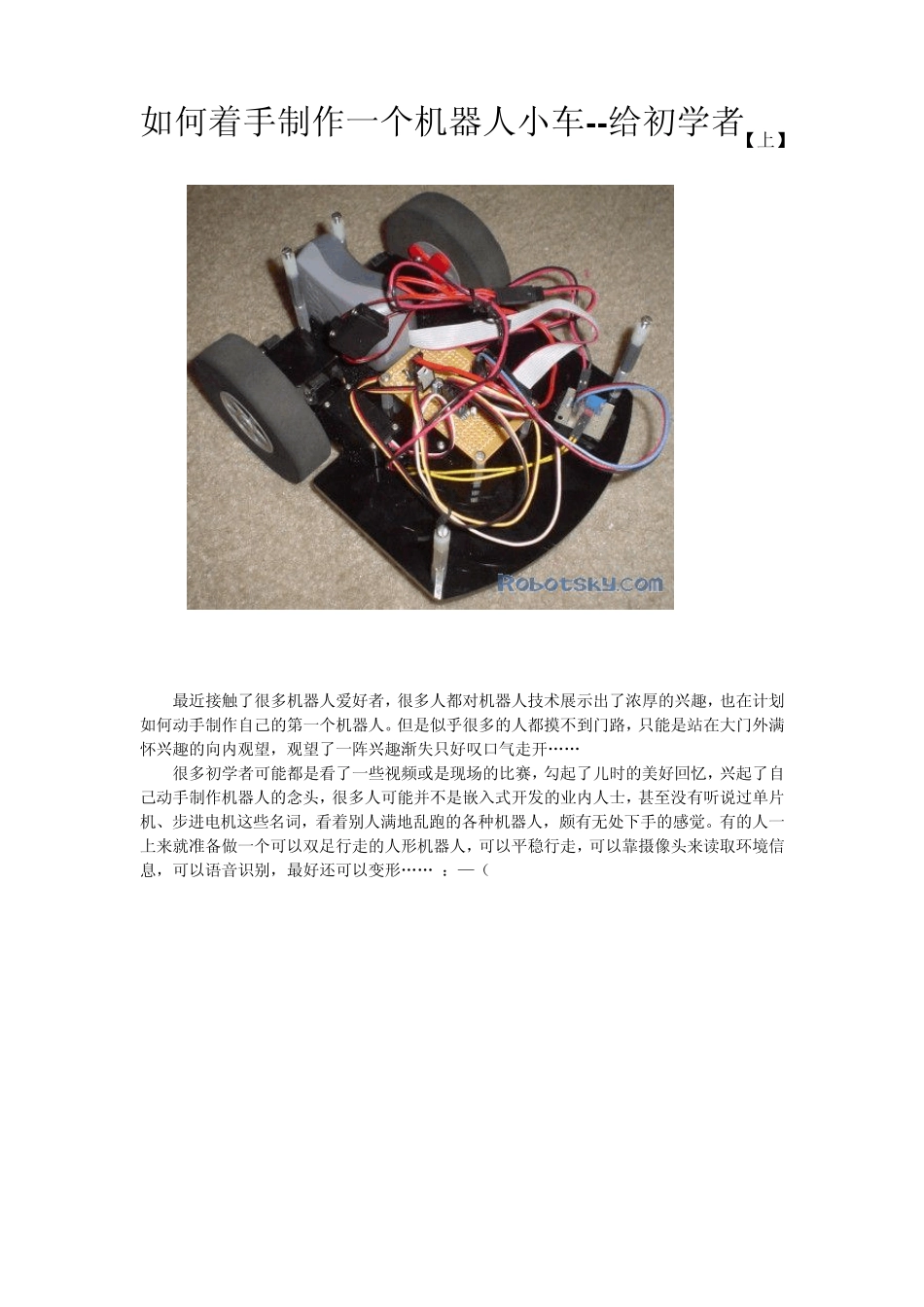
如何着手制作一个机器人小车--给初学者【上】 最近接触了很多机器人爱好者,很多人都对机器人技术展示出了浓厚的兴趣,也在计划如何动手制作自己的第一个机器人
但是似乎很多的人都摸不到门路,只能是站在大门外满怀兴趣的向内观望,观望了一阵兴趣渐失只好叹口气走开„„ 很多初学者可能都是看了一些视频或是现场的比赛,勾起了儿时的美好回忆,兴起了自己动手制作机器人的念头,很多人可能并不是嵌入式开发的业内人士,甚至没有听说过单片机、步进电机这些名词,看着别人满地乱跑的各种机器人,颇有无处下手的感觉
有的人一上来就准备做一个可以双足行走的人形机器人,可以平稳行走,可以靠摄像头来读取环境信息,可以语音识别,最好还可以变形„„ :—( 我的意见是:新手最好还是老老实实的从小车开始吧
人形机器人可以说是一个系统的大工程,不是一个人玩的起来的,而且资金上的投入也是不可计量的
一个人形机器人的成型产品最少要卖到几千块——要知道,你在开发过程中是不可能没有错误投入的
机器人小车技术上门槛较低,资金投入也少,市场上的各种产品和零配件的支持也较多,虽然简单,但可以实现的功能可一点也不少
我在这里凭自己的经验介绍一些自己动手制作机器人小车的基础知识,如果你是曾经自己动手做过的高手,那么你可以绕行,我这里介绍的都是为未入门者准备的最基本的理论知识和一些动手经验
那么现在我们开始,首先是理论部分——小车的控制结构
[一]小车的整体控制系统 小车是怎么来控制的
为什么小车判断出障碍物后可以自动的绕开
理论:控制工程——处理自动控制系统各种工程实现问题的综合性工程技术
包括对自动控制系统提出要求(即规定指标)、进行设计、构造、运行、分析、检验等过程
它是在电气工程和机械工程的基础上发展起来的
闭环控制:闭环控制有反馈环节,通过反馈系统是系统的精确度提高,响应时间缩短,适合于对系统的响应时间,稳定性要求高的系统