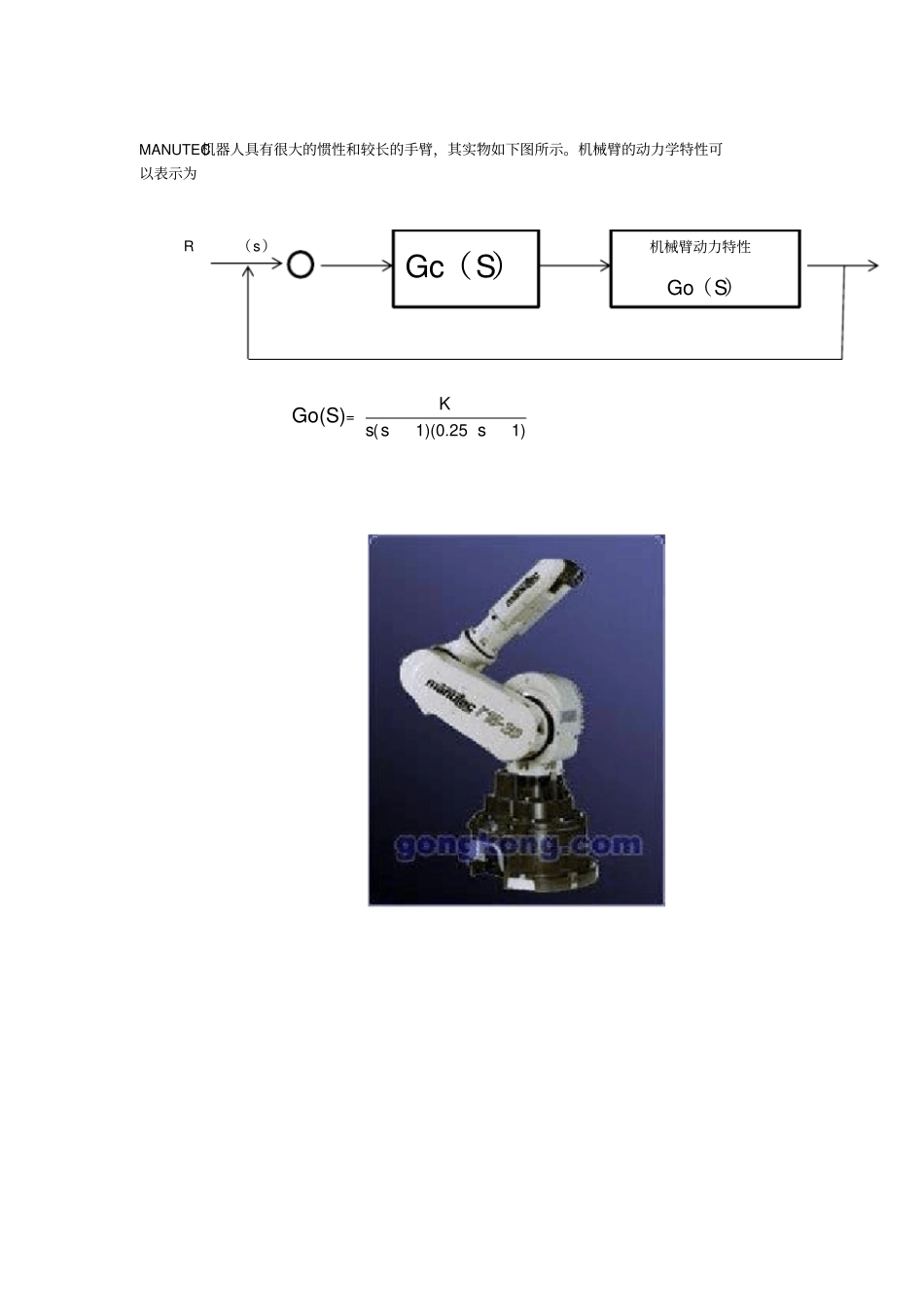
自动控制原理大作业题目:自动控制原理大作业专业班级:姓名:学号:MANUTEC机器人具有很大的惯性和较长的手臂,其实物如下图所示
机械臂的动力学特性可以表示为 R(s)Go(S)= (1)(0
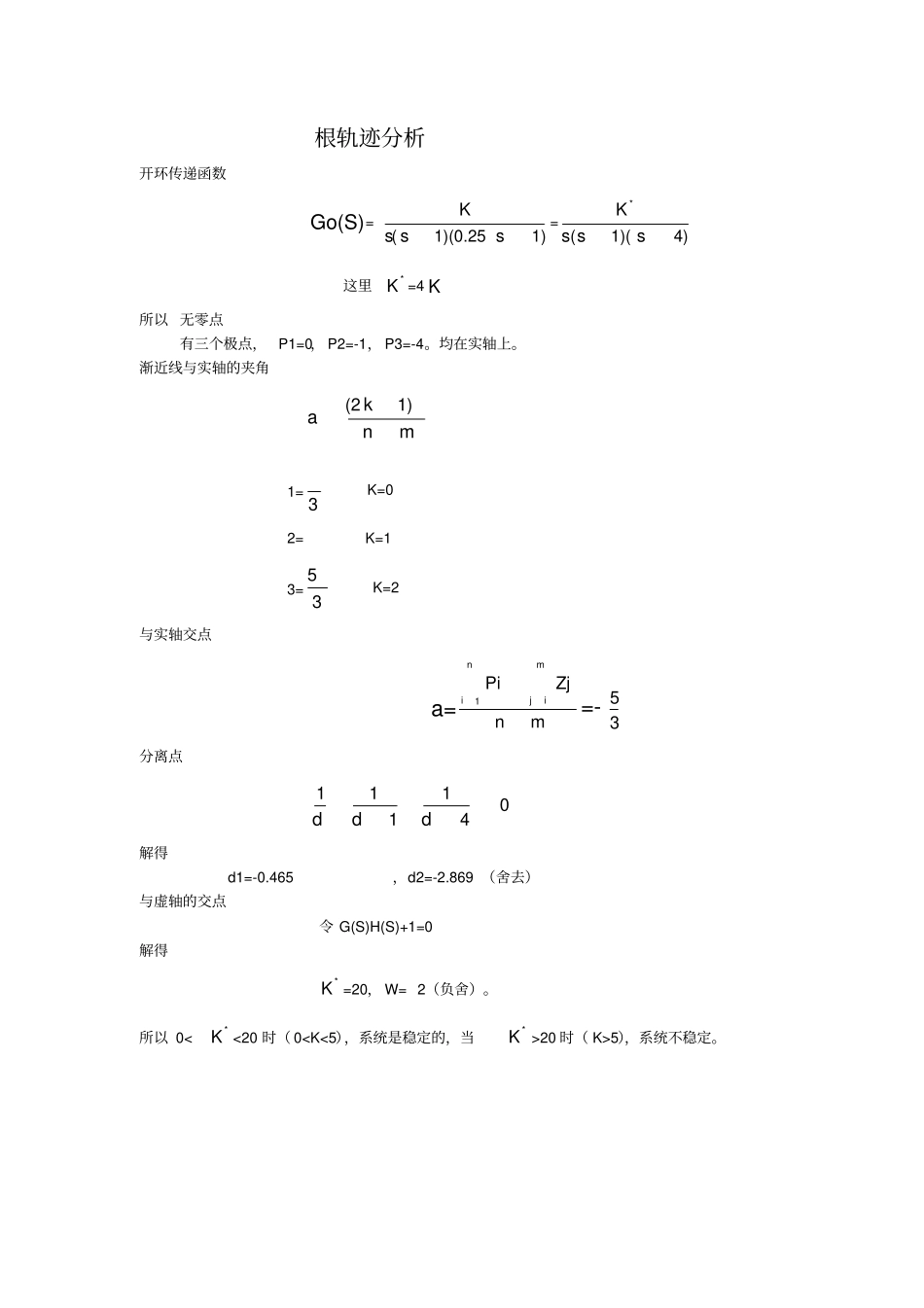
251)Ks ssGc(S)机械臂动力特性Go(S)根轨迹分析开环传递函数Go(S)= (1)(0
251)Ks ss=*(1)(4)Ks ss这里*K =4 K所以 无零点有三个极点, P1=0, P2=-1, P3=-4
渐近线与实轴的夹角(21)kanm1= 3 K=0 2= K=1 3= 53 K=2 与实轴交点a=1nmijiPiZjnm=- 53分离点111014ddd解得 d1=-0
465,d2=-2
869 (舍去)与虚轴的交点令 G(S)H(S)+1=0 解得*K =20, W= 2(负舍)
所以 0< *K 3,γ >45°校正前,令 A(W)=1 解得 Wc=1
4 此时相角裕度γ=()24warctwarct=16
不满足要求,需进行滞后校正
试选 Wm=Wc1=3rad/s
则 Wc1=1Ta20lg(A(Wc1)AjWc1))=0 A(Wc1)Aj (Wc1)=1 2222211T WT W a*222
0625w ww=1 将 Wc1=2带入并联立,解得a=0
143 T=63 所以超前校正系统Gc(S)= 3
校正系统传递函数为G(S)*Gc (S) =2
81*(1)(0
031SS SSS此时相角裕度W=3=+arctan(3
5)-( /2+arctant(w)+arctant(0
25w)+arctant(0
03w))=54°
校正前后 Matlab 仿真如下图所示校正前校正后总结 :通过本次作业, 我彻底弄清了三大分析方法的原理及区别,也清楚了校正环节的作