1 旋转工作台步进电机选型算法流程 qe > 10 弧分
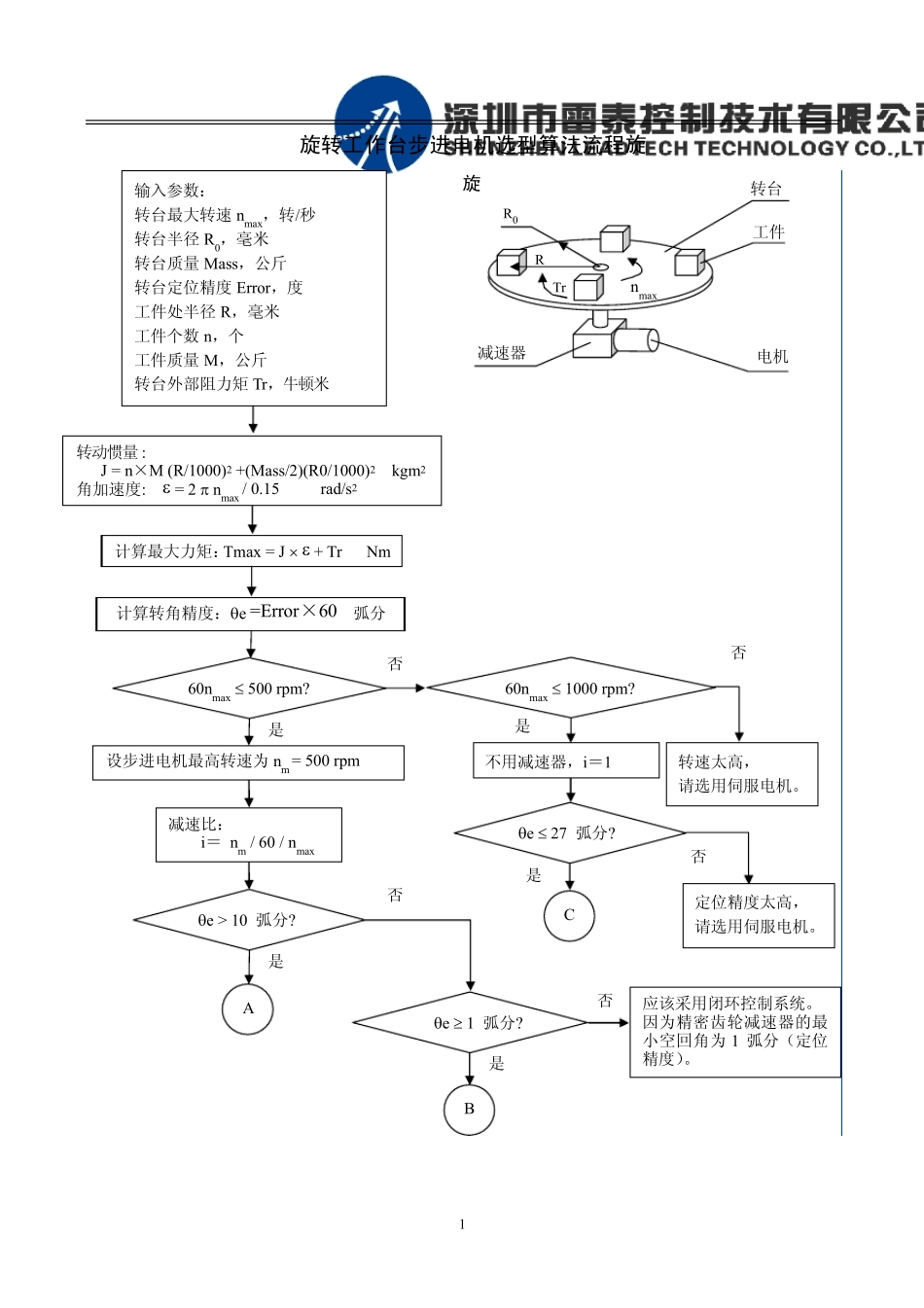
是 否 输入参数: 转台最大转速 nmax,转/秒 转台半径 R0,毫米 转台质量 Mass,公斤 转台定位精度 Error,度 工件处半径 R,毫米 工件个数 n,个 工件质量 M,公斤 转台外部阻力矩 Tr,牛顿米 转动惯量 : J = n×M (R/1000)2 +(Mass/2)(R0/1000)2 kgm2 角加速度: e = 2 p nmax / 0
15 rad/s2 qe ³ 1 弧分
应该采用闭环控制系统
因为精密齿轮减速器的最小空回角为 1 弧分(定位精度)
否 A B 是 计算转角精度:qe =Error×60 弧分 计算最大力矩:Tmax = J ´ e + Tr Nm 减速比: i= nm / 60 / nmax 设步进电机最高转速为 nm = 500 rpm 60nmax £ 500 rpm
是 否 转速太高, 请选用伺服电机
减速器 电机 转台 工件 R0 R nmax Tr 60nmax £ 1000 rpm
否 不用减速器,i=1 是 C qe £ 27 弧分
是 否 定位精度太高, 请选用伺服电机
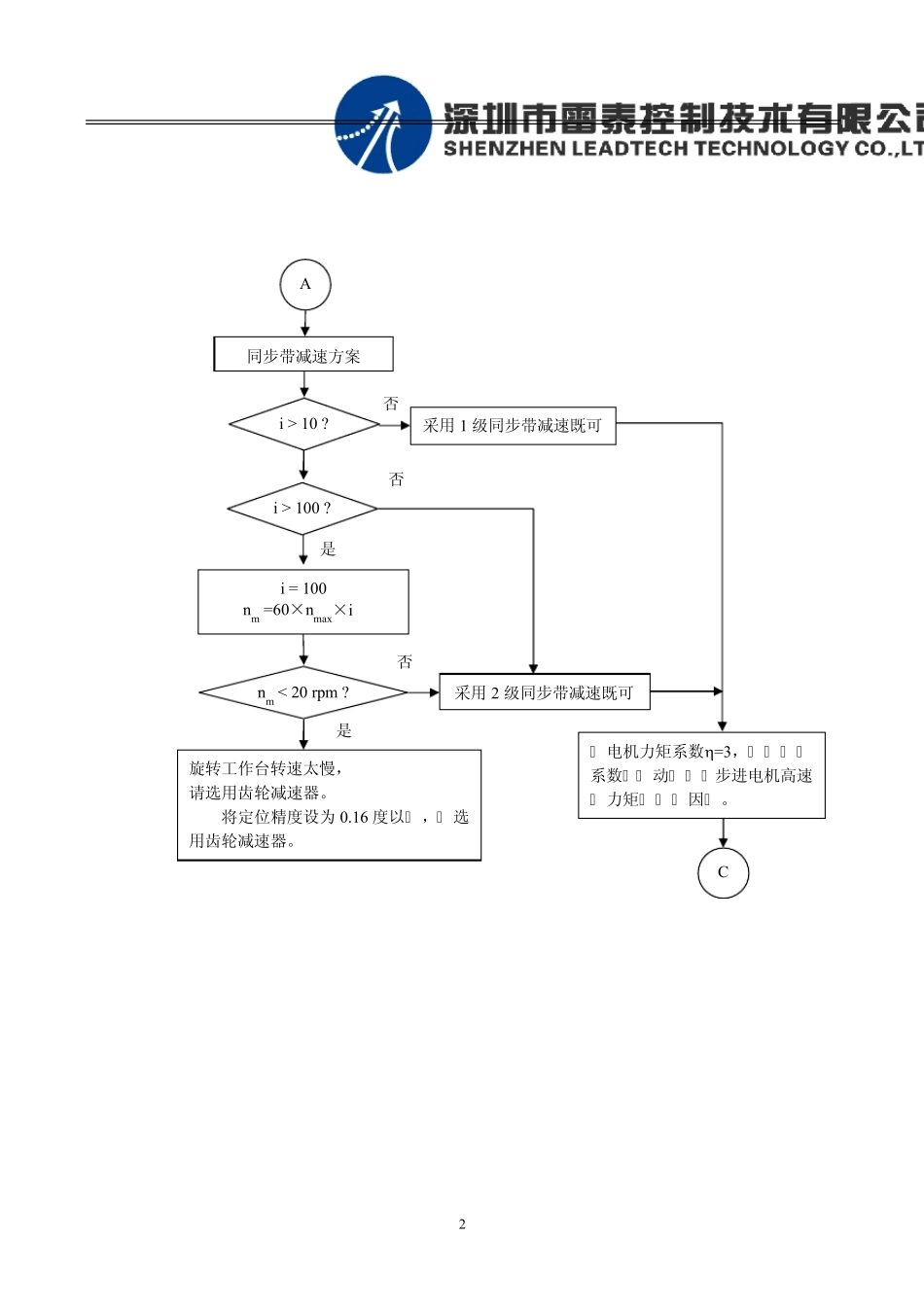
2 同步带减速方案 是 否 A 采用 2 级同步带减速既可 i > 10
否 采用 1 级同步带减速既可 i > 100
i = 100 nm =60×nmax×i nm < 20 rpm
否 旋转工作台转速太慢, 请选用齿轮减速器
将定位精度设为 0
16 度以下,即选用齿轮减速器
是 C 取电机力矩系数h=3,包含安全系数、传动效率、步进电机高速时力矩下降等因素
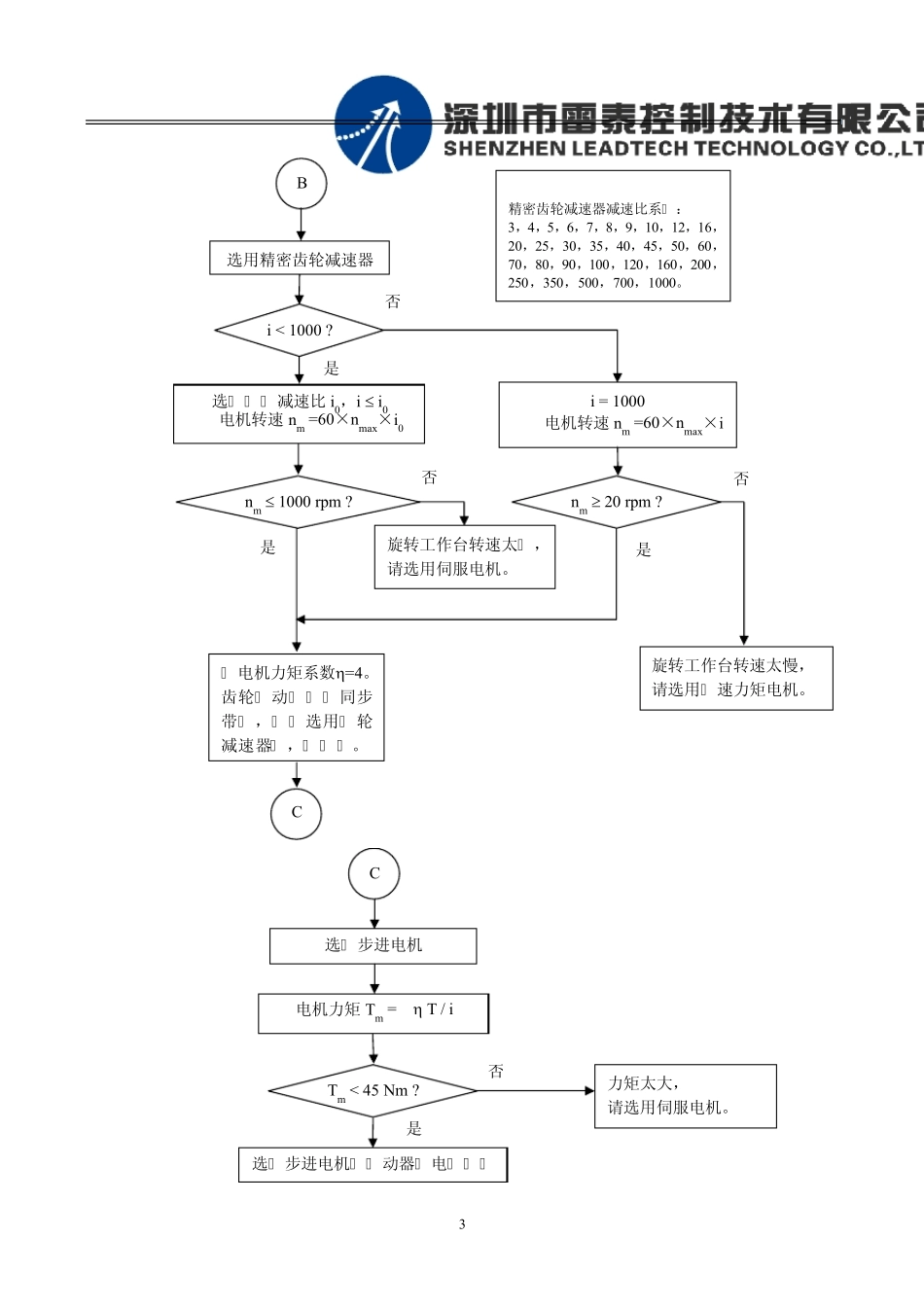
3 B 选取标准减速比 i0,i £ i0 电机转速 nm =60×nmax×i0 是 否 i < 1000
i = 1000 电机转速 nm =60×nmax×i nm ³ 20 r