遗传算法的仿真研究遗传算法 问题在生活与生产中的具体应用随处可见,可以说 遗传算法 问题从发现以来就一直就是一个炙手可热的研究问题,而相应的最短路径问题在生活生产的方方面面都会遇到,已经在很多领域都有着充分的运用
比如现在中国最前端的领域就有涉及, 比如:机器人在行动的时候必须做到自主无碰;无人机在飞行的时候必须做到避障突防;巡航导弹在飞行的时候必须做到躲避雷达的范围性探知;在我们的现实生活之中有:全球定位系统导航; 各个城市内部不同的道路网规划等
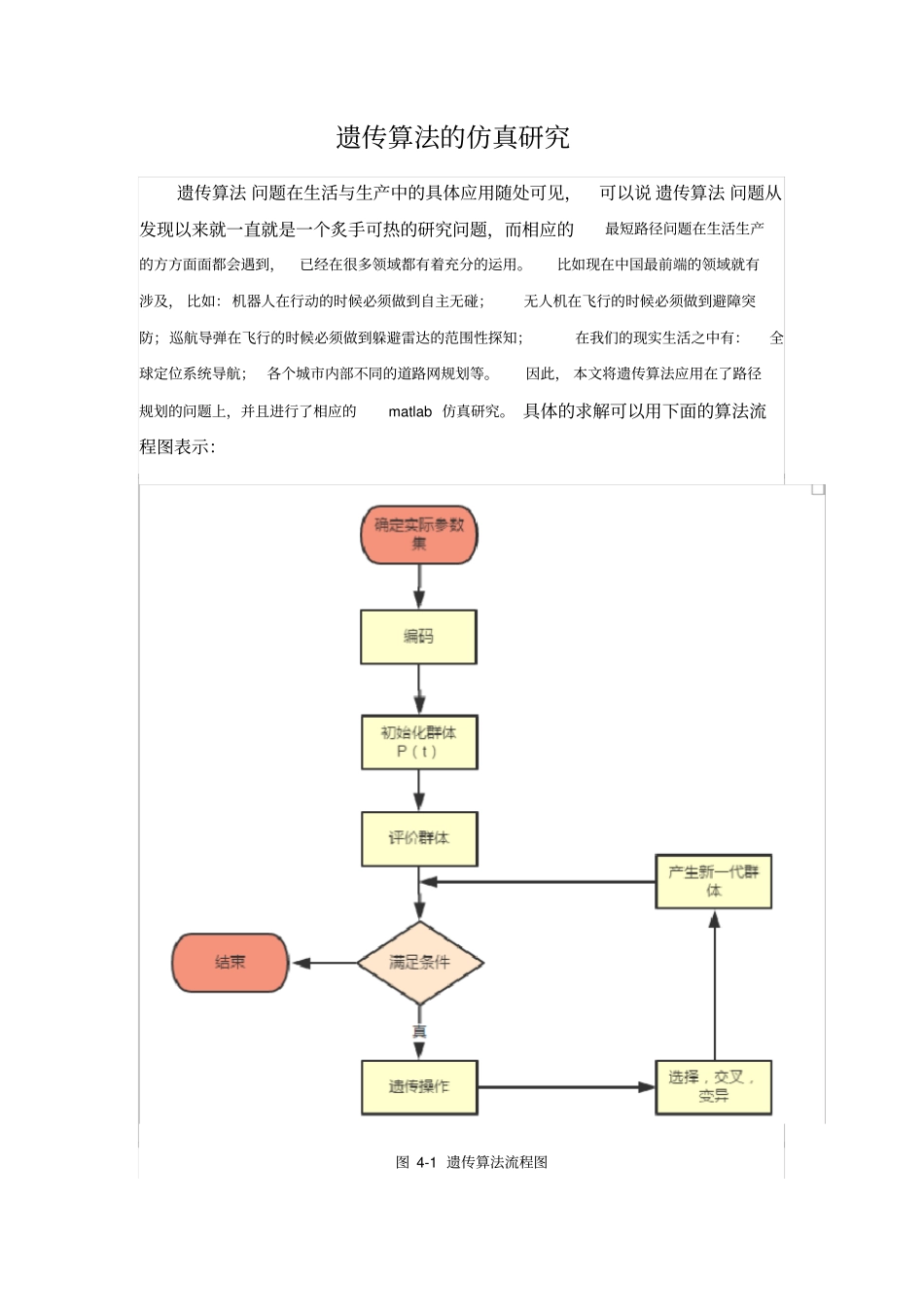
因此, 本文将遗传算法应用在了路径规划的问题上,并且进行了相应的matlab 仿真研究
具体的求解可以用下面的算法流程图表示:图 4-1 遗传算法流程图4
1 仿真实验环境设计这里我们研究的是遗传算法应用在了路径规划的问题的matlab 仿真
并且这里我们设置了二种情况的最短路径研究,第一种是设置了10 个点进行最短路径的遗传算法的研究, 第二种是设置了 30 个点进行最短路径的遗传算法的研究
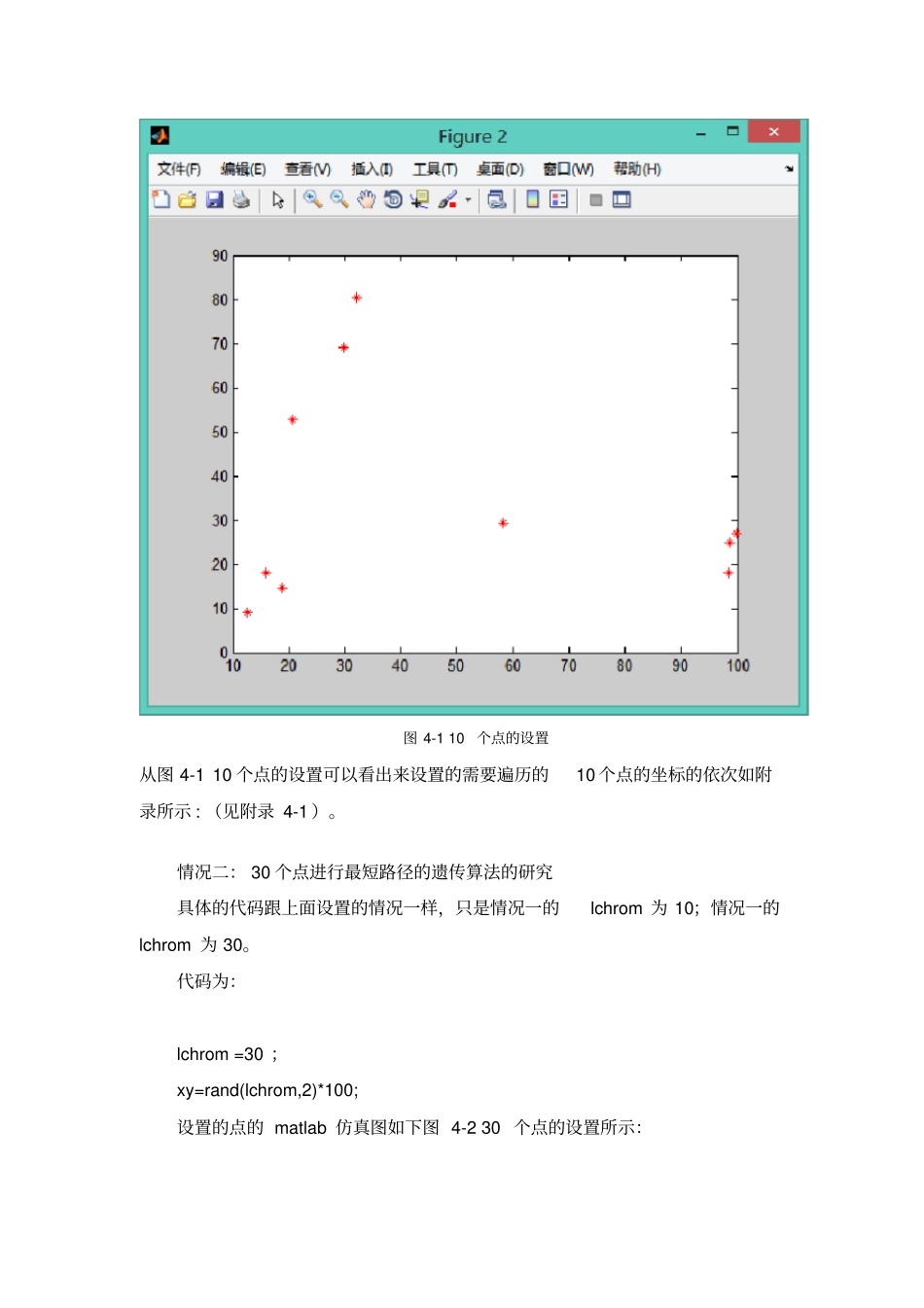
具体情况如下所示:情况一: 10 个点进行最短路径的遗传算法的研究具体的代码为:其中:主函数 function test(xy, lchrom, popsize, Pc, Pm, gen) 参数意义: xy为点的坐标 (lchrom 行 2 列的矩阵, 可以随机生成也可以自己定) lchrom 为点的个数(点数)(10-30 );popsize 初始种群规模数(100-200); Pc 交叉概率,一般较大接近于1 (0
8--1 ); Pm变异概率,小,接近与0(0-0
10); gen 叠代的代数(500-2000);function elim=eliminate(x,y) ;消去相同的function pop=inigroup(lchrom,popsize) ; 产生初试种群function m=crossover(oldp1,o