1、当您付费下载文档后,您只拥有了使用权限,并不意味着购买了版权,文档只能用于自身使用,不得用于其他商业用途(如 [转卖]进行直接盈利或[编辑后售卖]进行间接盈利)。2、本站所有内容均由合作方或网友上传,本站不对文档的完整性、权威性及其观点立场正确性做任何保证或承诺!文档内容仅供研究参考,付费前请自行鉴别。3、如文档内容存在违规,或者侵犯商业秘密、侵犯著作权等,请点击“违规举报”。
碎片内容
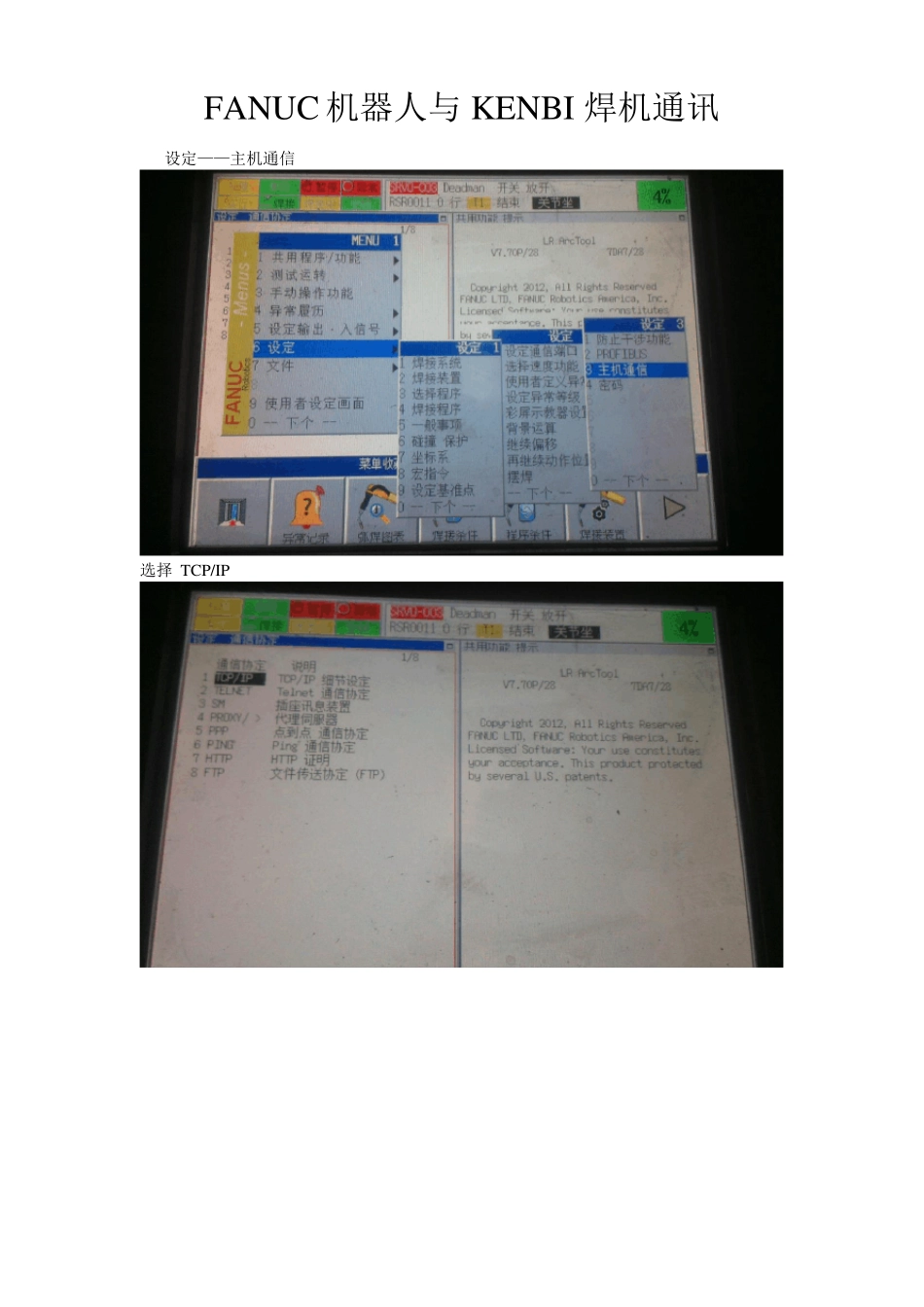
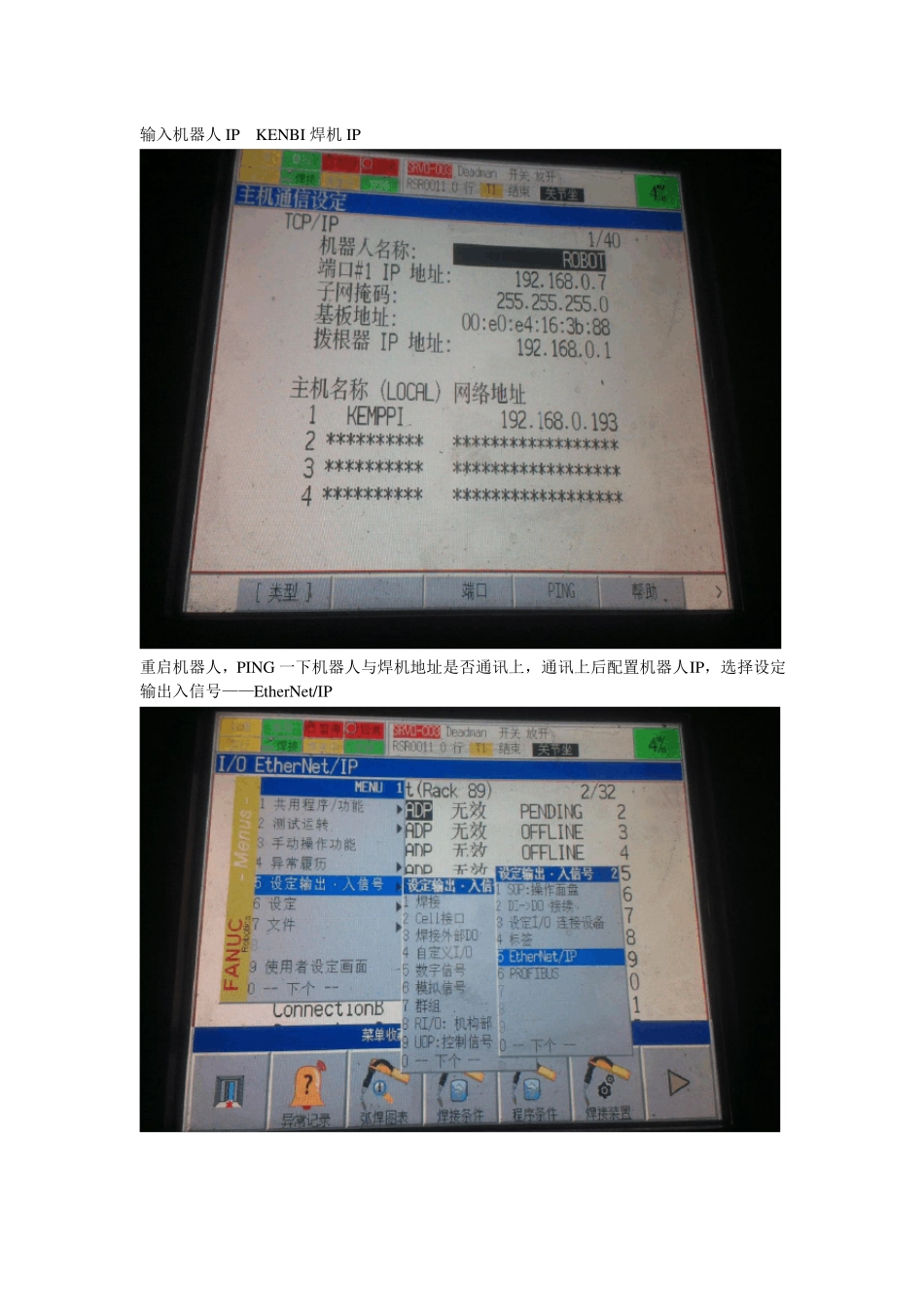
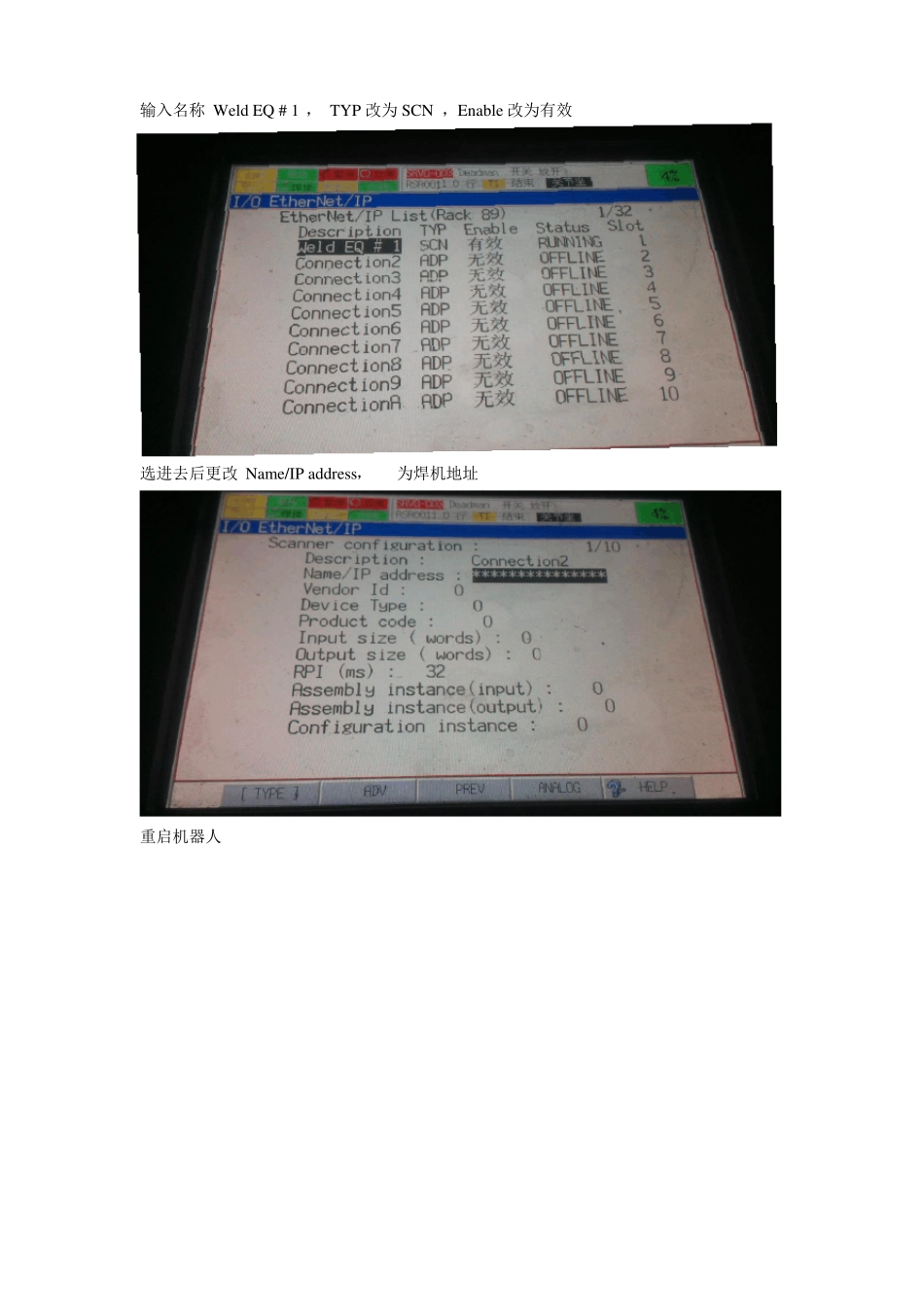
FANUC 机器人与 KENBI 焊机通讯设定——主机通信选择 TCP/IP输入机器人 IPKENBI 焊机 IP重启机器人,PING 一下机器人与焊机地址是否通讯上,通讯上后配置机器人IP,选择设定输出入信号——EtherNet/IP输入名称 Weld EQ # 1 , TYP 改为 SCN ,Enable 改为有效选进去后更改 Name/IP address,为焊机地址重启机器人配置数字量 IO机架 89数字量输出信号相关信号备注如下数字量输入信号,机架 89相关备注如下配置焊接输入输出信号(WO 改为 DO,相关对应输入输出信号如下)将调用的焊接规范号做到组信号里面组信号与暂存器关联编写一个例行程序 G03=R10,将程序放到背景运算里面,进行实时扫描R10 寄存器使用方法如下
该用户很懒,什么也没介绍