《现代控制理论基础》实验报告学生姓名郑棉育学号201311632226所在专业自动化所在班级1132指导教师张冰实验一状态空间控制模型系统仿真及状态方程求解[实验目的]1、熟悉线性定常离散与连续线性性系统的状态空间控制模型的各种表示方法
2、熟悉系统模型之间的转换功能
3、利用 MATLAB对线性定常系统进行动态分析[实验内容]1、给定系统125
032)(2323sssssssG,求系统的零极点增益模型和状态空间模型,并求其单位脉冲响应及单位阶跃响应
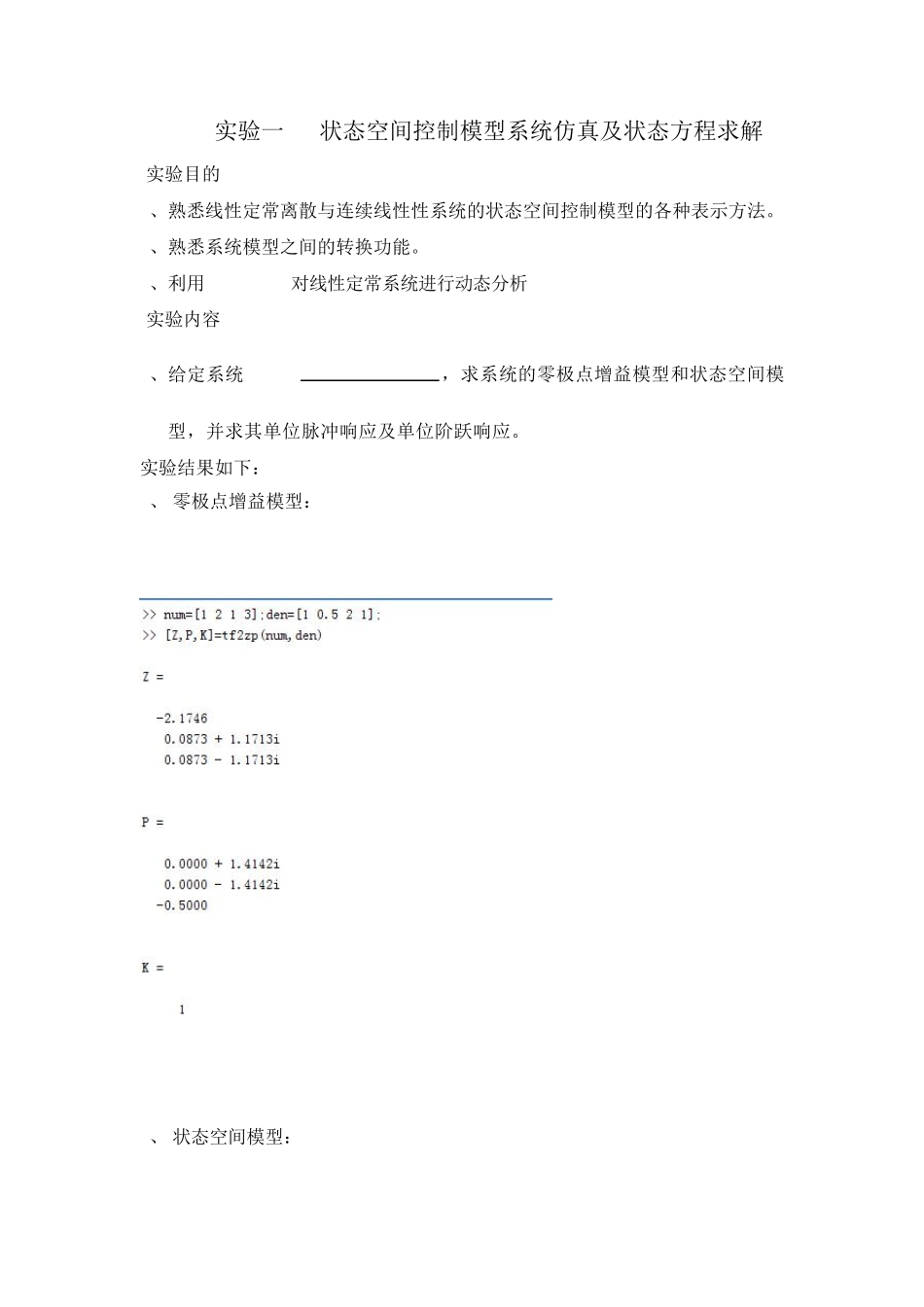
实验结果如下:1、 零极点增益模型:>>num=[1213];den=[10
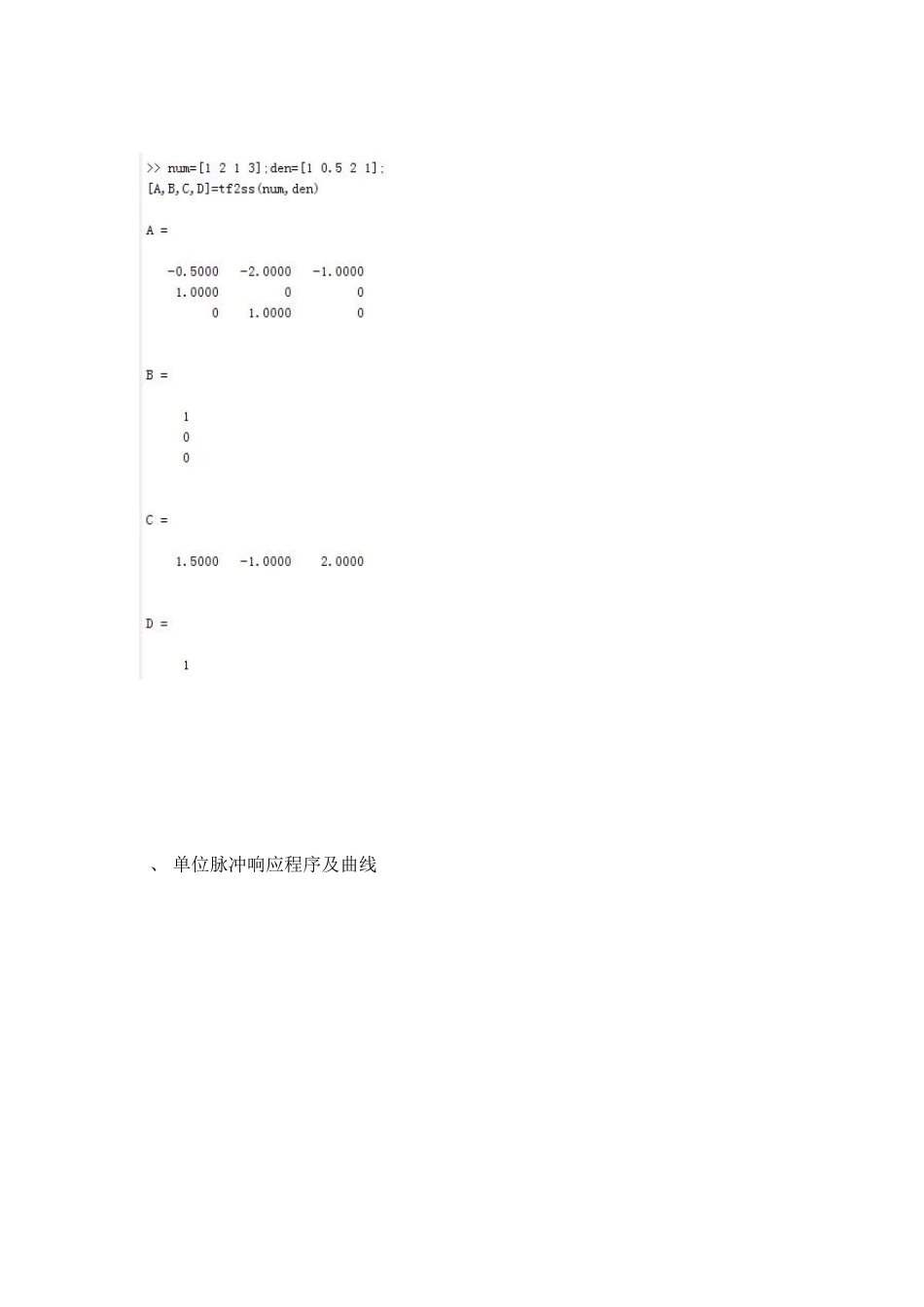
521];>>[Z,P,K]=tf2zp(num,den)2、 状态空间模型:>>num=[1213];den=[10
521];[A,B,C,D]=tf2ss(num,den)3、 单位脉冲响应程序及曲线>>num=[1213];den=[10
521];>>impulse(num,den);4、 单位阶跃响应程序及曲线>>num=[1213];den=[10
521];step(num,den);实验二状态反馈及状态观测器的设计[实验目的]1、熟悉状态反馈矩阵的求法
2、熟悉状态观测器设计方法
[实验内容]1、 某控制系统的状态方程描述如下:242471,0001,01000010000124503510CBA通过状态反馈使系统的闭环极点配置在 P=[-30,-1
44i]位置上,求出状态反馈阵 K,并绘制出配置后系统的时间响应曲线
解:实验程序如下运行结果如下配置后系统的时间响应曲线:5、 考虑下面的状态方程模型:0,001,10000,100008
20980010DCBA要求选出合适的参数状态