机器人与SMART 组件的配置 1
打开RobotStu dior 软件,创建一个新工作站 2
打开相应的机器人系统并且导入做好的SMART 组件 3
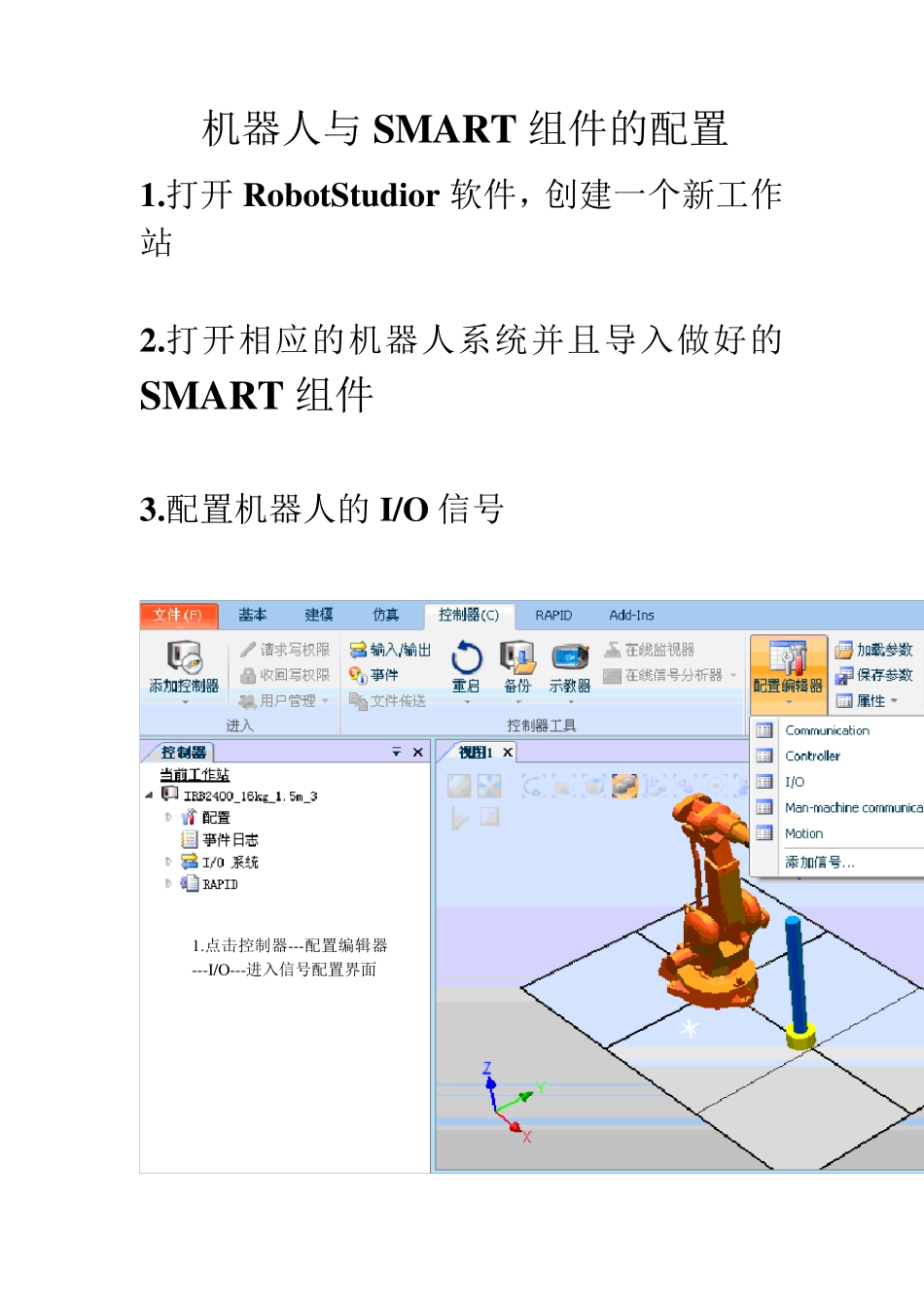
配置机器人的I/O 信号 1
点击控制器---配置编辑器---I/O ---进入信号配置界面 注:导入的SMART 组件中有几个DI 信号就新建几个DO 信号,创建完成之后重启控制器
创建一个虚拟单元:V_Board(右键单元界面新建) 3
新建输出信号do(新建方法跟 1 相同) 4
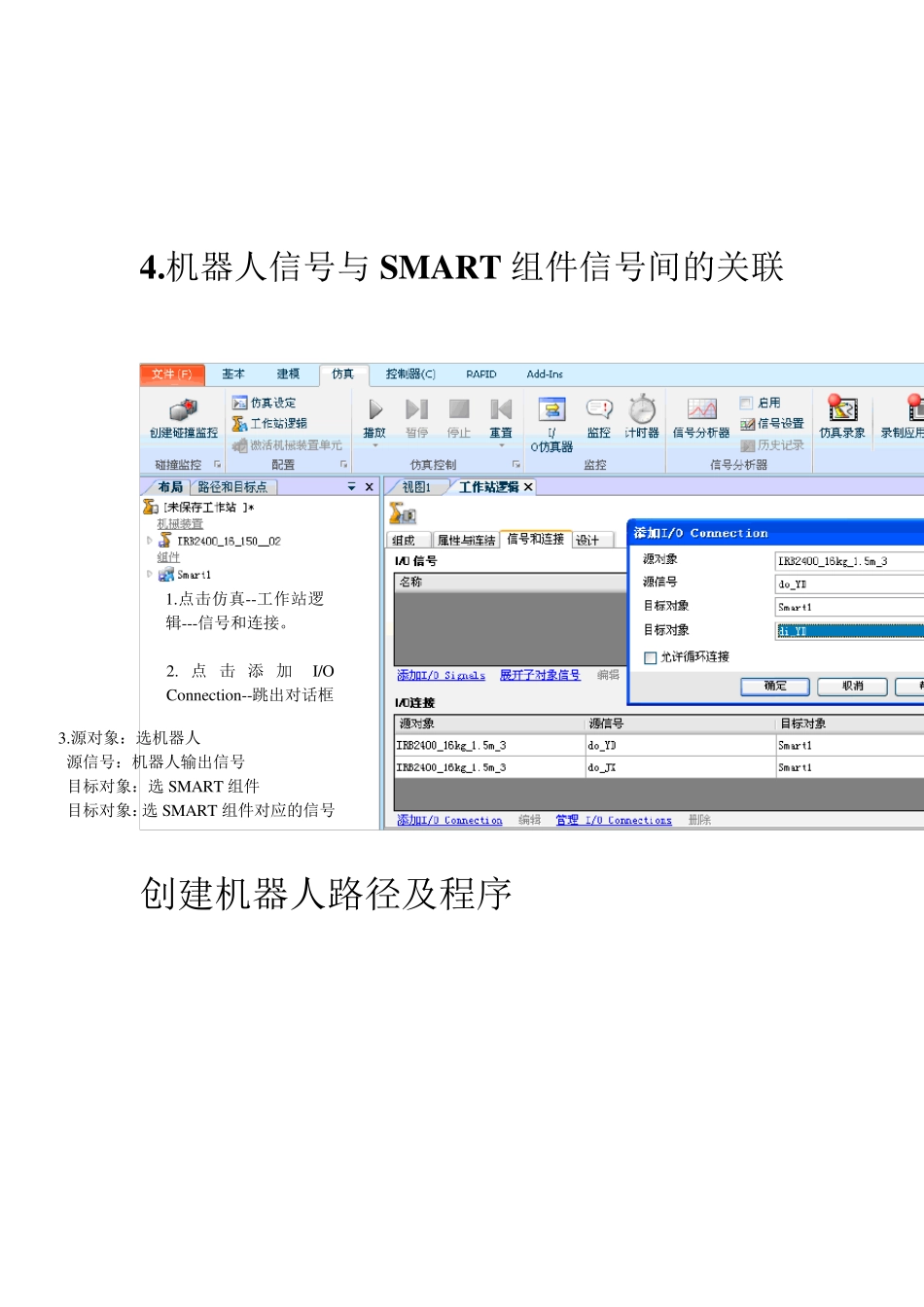
机器人信号与SMART 组件信号间的关联 创建机器人路径及程序 1
点击仿真--工作站逻辑---信号和连接
点击添 加I/O Connection--跳出对话框 3
源对象:选机器人 源信号:机器人输出信号 目标对象:选 SMART 组件 目标对象:选 SMART 组件对应的信号 ⑴.创建运动指令界面及逻辑指令界面 1
右键--创建路径 2
创建好路径之后---右键路径---插入运动指令或逻辑指令 1
参考坐标选2
把光标停留在位置上,点击机器人需要行走的轨迹点
点击轨迹点之后这里会出现点 4
是否修改目标点的名称,选择任务及工件坐标
确定把指令插入到哪个路径里,选完后点击创建即可
选择任务 2
选择路径 3
选择逻辑指令 4
设置指令的参数 ⑵.调整轨迹点上工具的姿态 也可以通过此处来示教点和添加指令 注3 :当机器人到达目标点的姿态不好时,可以调整工具的姿态
注5 :参数配置必须每个点单独配置
打开工件坐标w obj0--右键目标点---选中查看目标工具 2
点击修改目标---旋转---把工具旋转到机器人范围之内 5
点击参数配置---选择机器人到达目标点最好姿态
点击查看机器人目标----看是否机器人能到达行程范围
当工具调整好位置时,可以通过复制方向--然后应用