二、知识结构 1
角的概念的推广: (1)定义:一条射线OA由原来的位置OA,绕着它的端点O按一定方向旋转到另一位置OB,就形成了角α
其中射线OA叫角α 的始边,射线OB叫角α 的终边,O叫角α 的顶点
(2)正角、零角、负角:由始边的旋转方向而定
(3)象限角:由角的终边所在位置确定
第一象限角:2kπ <α <2kπ +2,k∈Z 第二象限角:2kπ +2<α <2kπ +π ,k∈Z 第三象限角:2kπ +π <α <2kπ +23,k∈Z 第四象限角:2kπ +23 <α <2kπ +2π ,k∈Z (4)终边相同的角:一般地,所有与α 角终边相同的角,连同α 角在内(而且只有这样的角),可以表示为k²360°+α ,k∈Z
(5)特殊角的集合: 终边在坐标轴上的角的集合{α |α = 2k,k∈Z} 终边在一、三象限角平分线上角的集合{α |α =kπ +4,k∈Z} 终边在二、四象限角平分线上角的集合{α |α =kπ -4,k∈Z} 终边在四个象限角平分线上角的集合{α |α =kπ -4,k∈Z} 2
弧度制: (1)定义:用“弧度”做单位来度量角的制度,叫做弧度制
(2)角度与弧度的互化: 1°=180弧度,1弧度=(180)° (3)两个公式:(R为圆弧半径,α 为圆心角弧度数)
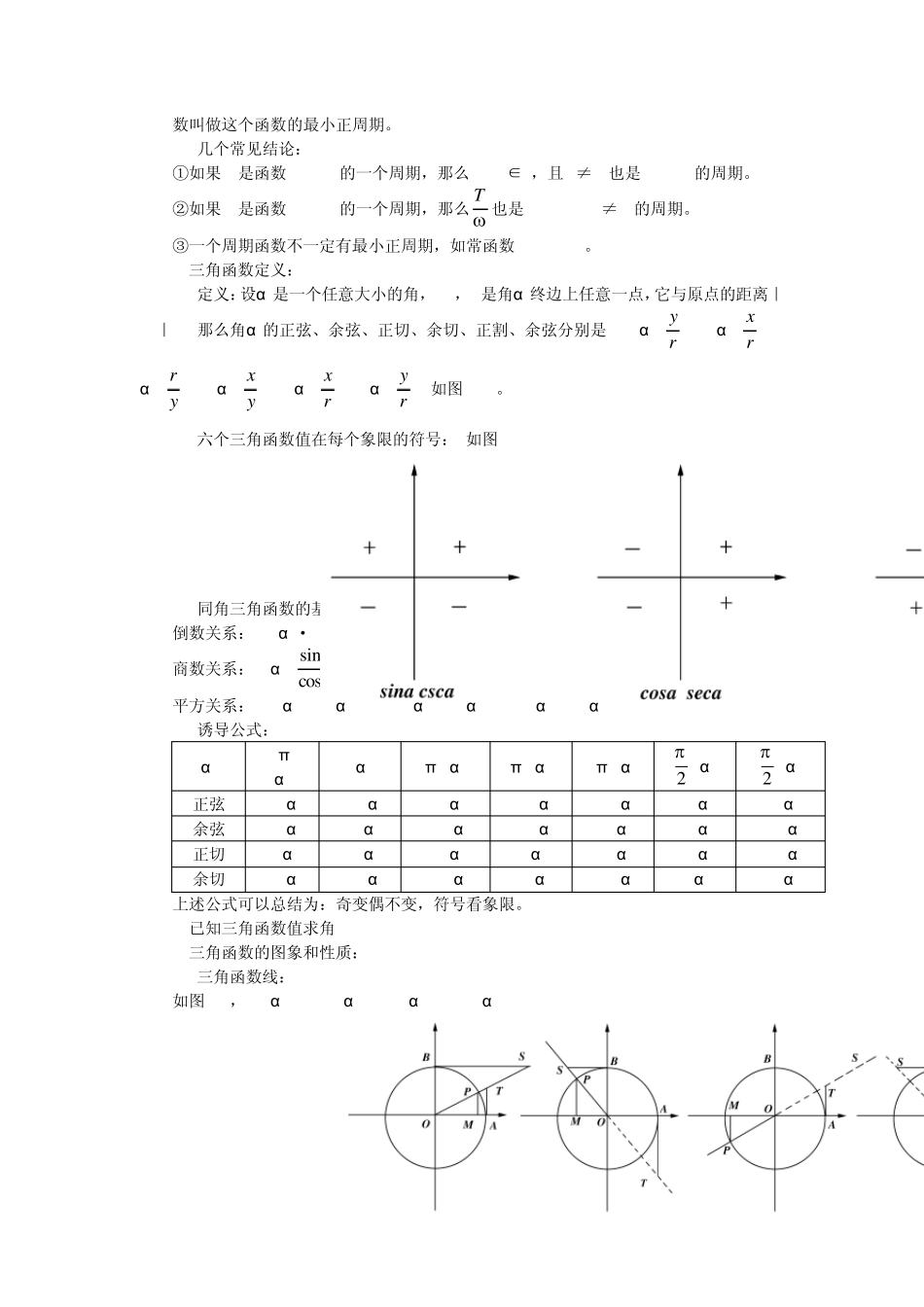
弧长公式:l=|α |R 扇形面积公式:S=21lR=21|α |R2 角当中的对称问题: 与角 终边关于 x轴对称的角的集合; 与角 终边关于 y轴对称的角的集合 与角 终边关于原点轴对称的角的集合 与角 终边关于 y=x轴对称的角的集合 与角 终边关于 y=-x轴对称的角的集合 3
周期函数: (1)定义:对于函数 y=f(x),如果存在一个非零常数 T,使得 x取定义域内的任意值时,都有f(x+T)=f(x),那么函数