Transformer( 变压器 )Driver Unit( 驱动板 )Serial Measurement Unit( 串口测量板 )Axis Computer( 轴计算机 )Main Computer( 主计算机 )Gear齿轮箱Motor电机Resolve编码器1、安全自动模式中,任何人不得进入机器人工作区域长时间待机时,夹具上不宜放置任何工件
机器人动作中发生紧急情况或工作不正常时,均可使用 E-stop 键,停止运行(但这将直接使程序终止不可继续)进行编程、测试及维修等工作时,必须将机器人置于手动模式
调试机器人过程中,不需要移动机器人时,必须释放使能器
调试人员进入工作区域时,必须随携带使能器,以防他人操作
突然停电时,必须立即关闭机器人主电源开头,并取下夹具上的工件
严禁非授权人员操作机器人
2、简介1974 ABB 第一台机器人诞生,IRC5 为目前最新推出的控制系统
所属机器人大部分用于焊接、喷涂及搬运用
当前使用的机器人型号为 IRB1410,其承重能力为 5KG,上臂可承受 18KG 的附加载荷,这在同类机器人中绝无仅有
最大工作半径 1444mm,常用于焊接与范围搬运,具可再扩展一个外部轴的能力
3、机器人系统简介机械手为六轴组成的空间六杆开链机构,理论上可达到运动范围内任何一点
每个转轴均带一个齿轮箱,机械手运动精度(综合)达正负 0
05mm 至正负 0
六轴均带 AC 伺服电机驱动,每个电机后均有编码器与刹车
机械手带有串口测量板(SMB),测量板上带有六节可充电的镍铬电池,起到保存数据的作用
机械手带有手动松闸按钮,维修时使用,非正常使用会造成设备或人员被伤害
机械手带有平衡气缸或弹簧
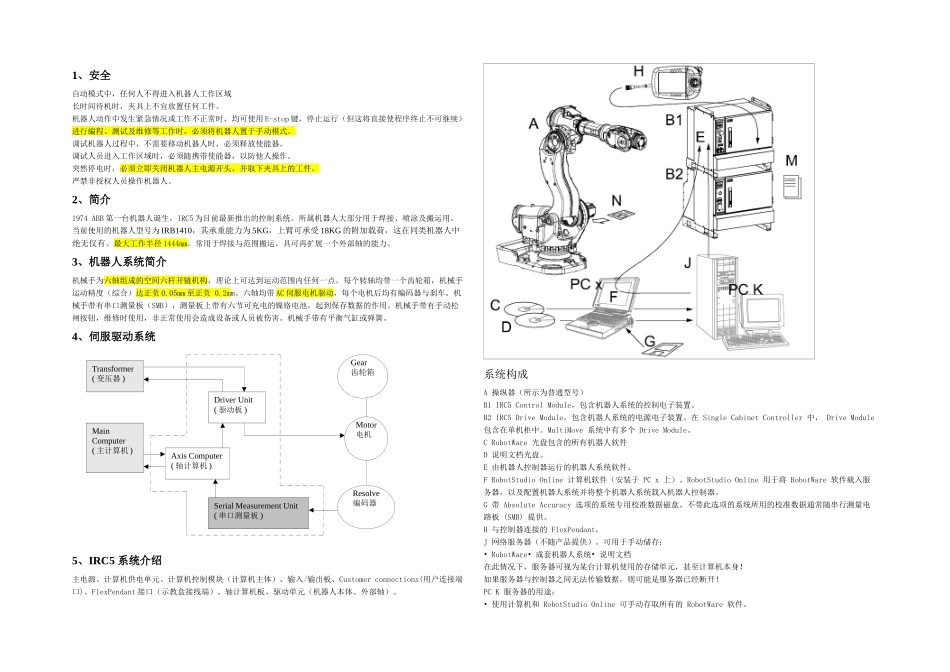
4、伺服驱动系统5、IRC5 系统介绍主电源、计算机供电单元、计算机控制模块(计算机主体)、输入/输出板、Customer connections(用