精品文档---下载后可任意编辑步进电机最早是在 1920 年代由英国人所开发
1950 年代后期晶体管的发明也逐渐应用在步进电机上,对于数字化的控制变得更为容易
往后经过不断改良,使得今日步进电机已广泛运用在需要高定位精度、高分解能、高响应性、信赖性等灵活控制性高的机械系统中
在生产过程中要求自动化、省人力、效率高的机器中,我们很容易发现步进电机的踪迹,尤其以重视速度、位置控制、需要精确操作各项指令动作的灵活控制性场合步进电机用得最多
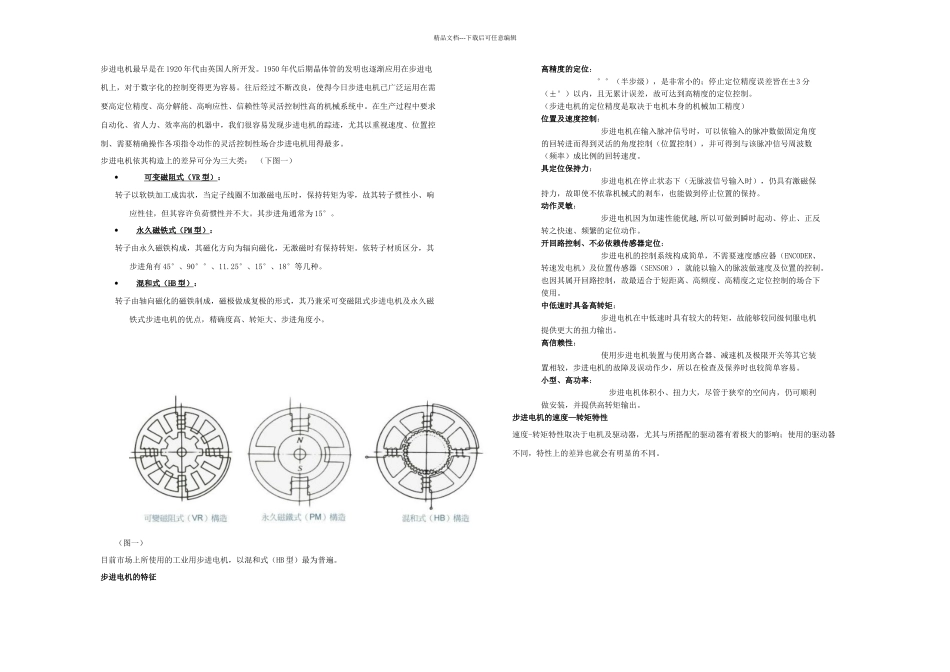
步进电机依其构造上的差异可分为三大类: (下图一) 可变磁阻式( VR 型) :转子以软铁加工成齿状,当定子线圈不加激磁电压时,保持转矩为零,故其转子惯性小、响应性佳,但其容许负荷惯性并不大
其步进角通常为 15°
永久磁铁式( PM 型) :转子由永久磁铁构成,其磁化方向为辐向磁化,无激磁时有保持转矩
依转子材质区分,其步进角有 45°、90°°、11
25°、15°、18°等几种
混和式( HB 型) :转子由轴向磁化的磁铁制成,磁极做成复极的形式,其乃兼采可变磁阻式步进电机及永久磁铁式步进电机的优点,精确度高、转矩大、步进角度小
(图一) 目前市场上所使用的工业用步进电机,以混和式(HB 型)最为普遍
步进电机的特征高精度的定位: °°(半步级),是非常小的;停止定位精度误差皆在±3 分(±°)以内,且无累计误差,故可达到高精度的定位控制
(步进电机的定位精度是取决于电机本身的机械加工精度)位置及速度控制: 步进电机在输入脉冲信号时,可以依输入的脉冲数做固定角度的回转进而得到灵活的角度控制(位置控制),并可得到与该脉冲信号周波数(频率)成比例的回转速度
具定位保持力: 步进电机在停止状态下(无脉波信号输入时),仍具有激磁保持力,故即使不依靠机械式的剎车,也能做到停止位置的保持
动作灵敏: 步进电机因为加速性能优越,