旋转式编码器概要 旋转式编码器的定义 旋转式编码器,是将旋转的机械位移量转换为电气信号,对该信号进行处理后检测位置速度等的传感器
检测直线机械位移量的传感器称为线性编码器
特长 ①根据轴的旋转变位量进行输出 通过联合器与轴结合,能直接检测旋转位移量
; ②启动时无需原点复位
(仅绝对型) 绝对型的情况下,将旋转角度作为绝对数值进行并列输出
③可对旋转方向进行检测
增量型中可通过 A 相和 B 相的输出时间,绝对型中可通过代码的增减来掌握旋转方向
④请根据丰富的分辨率和输出型号,选择最合适的传感器
根据要求精度和成本、连接电路等,选择适合的传感器
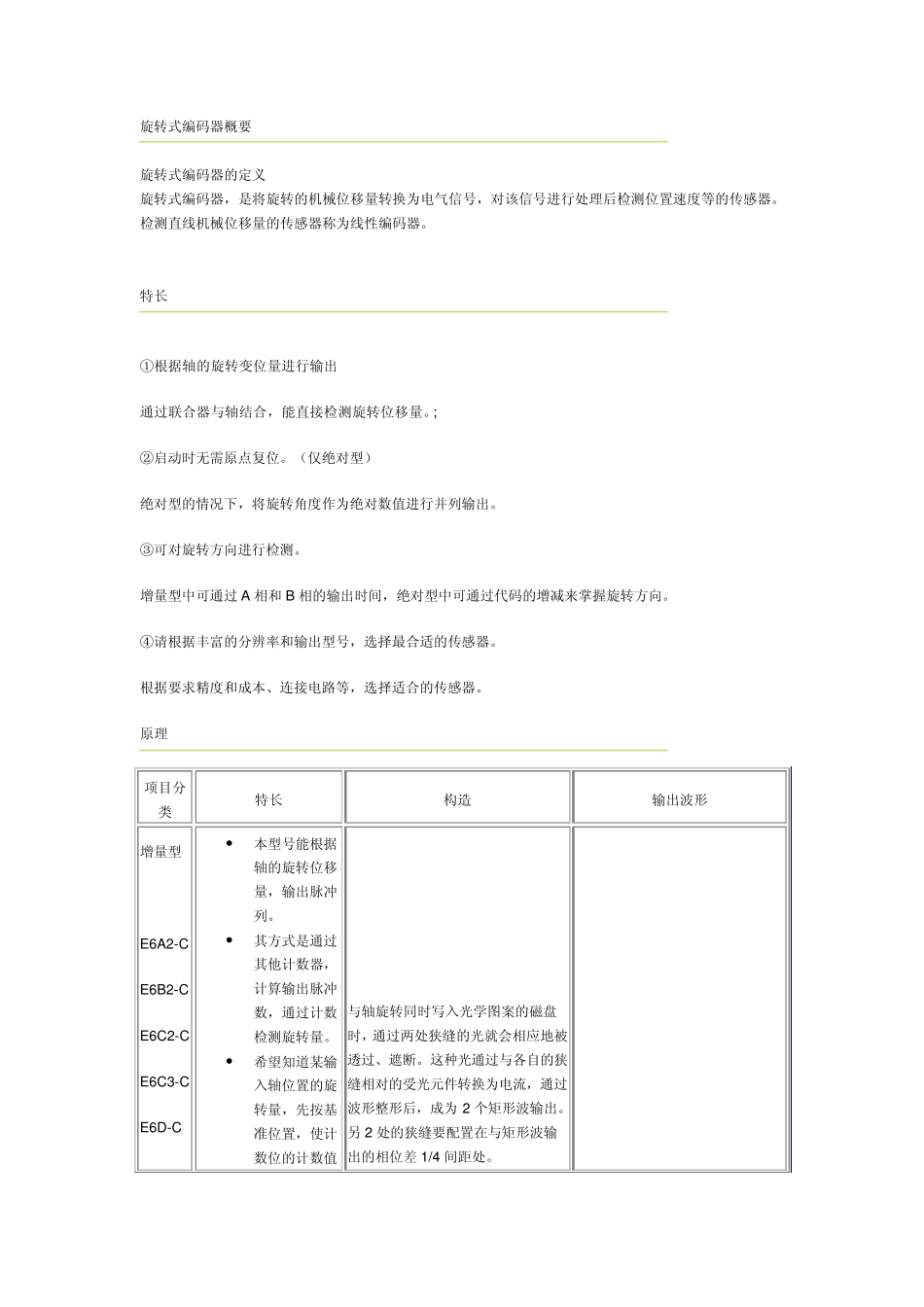
原理 项目分类 特长 构造 输出波形 增量型 E6A2-C E6B2-C E6C2-C E6C3-C E6D-C 本型号能根据轴的旋转位移量,输出脉冲列
其方式是通过其他计数器,计算输出脉冲数,通过计数检测旋转量
希望知道某输入轴位置的旋转量,先按基准位置,使计数位的计数值 与轴旋转同时写入光学图案的磁盘时,通过两处狭缝的光就会相应地被透过、遮断
这种光通过与各自的狭缝相对的受光元件转换为电流,通过波形整形后,成为2 个矩形波输出
另 2 处的狭缝要配置在与矩形波输出的相位差 1/4 间距处
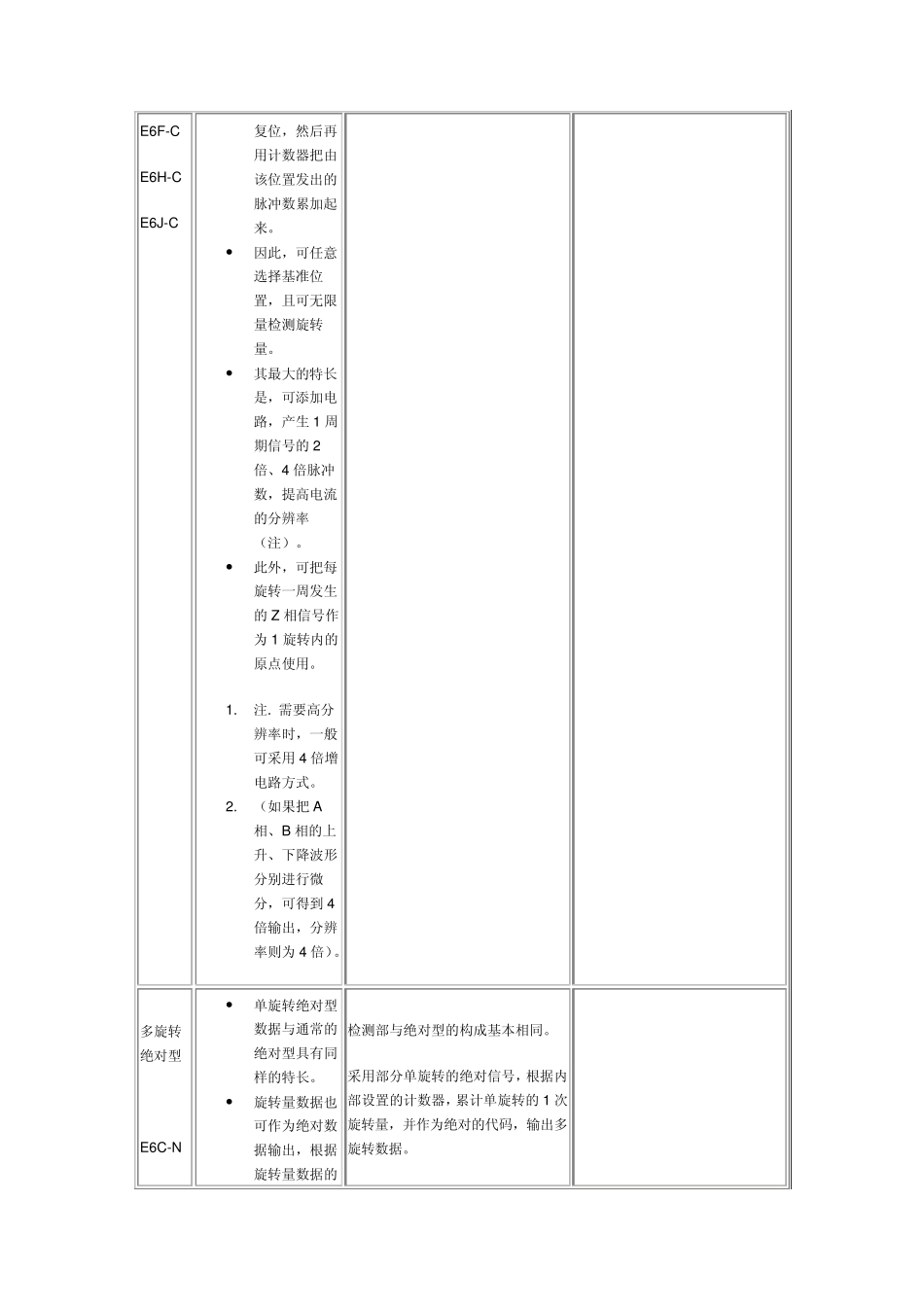
E6F-C E6H-C E6J-C 复位,然后再用计数器把由该位置发出的脉冲数累加起来
因此,可任意选择基准位置,且可无限量检测旋转量
其最大的特长是,可添加电路,产生1 周期信号的2倍、4 倍脉冲数,提高电流的分辨率(注)
此外,可把每旋转一周发生的Z相信号作为 1 旋转内的原点使用
需要高分辨率时,一般可采用4 倍增电路方式
(如果把A相、B 相的上升、下降波形分别进行微分,可得到 4倍输出,分辨率则为 4 倍)
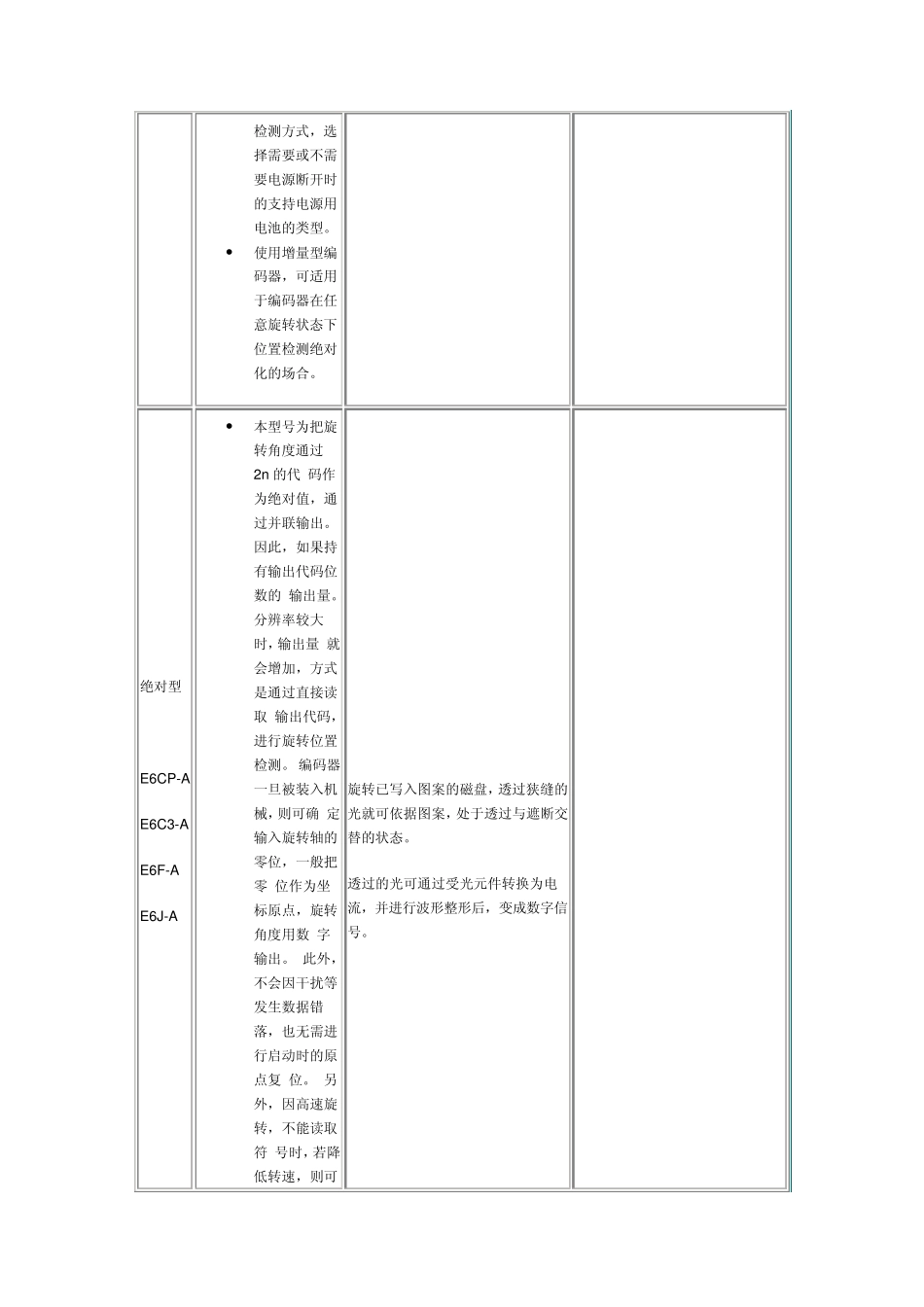
多旋转绝对型 E6C-N 单旋转绝对型数据与通常的