1 教案首页 课程名称 农业机器人 任课教师 李玉柱 第 4 章 机器人传感技术 计划学时 3 教学目的和要求: 1
了解机器人常用传感器的分类; 2
了解机器人内部传感器的分类和工作原理; 3
了解机器人外部传感器的分类和工作原理; 4
掌握几种常见机器人用传感器的原理
机器人内部传感器的分类和工作原理; 2
机器人外部传感器的分类和工作原理; 难点: 1
机器人外部传感器的分工作原理(力觉传感器、触觉传感器、接近觉传感器、滑觉传感器、视觉传感器、听觉传感器、嗅觉传感器、味觉传感器); 思考题: 1
试述传感器在机器人技术中的主要作用有哪些
机器人的内部传感器和外部传感器的作用是什么
设想一个高智能类人机器人大约会用到哪些传感器技术
2 第4 章 机器人传感器技术 教学主要内容: 4
1 机器人常用传感器的分类 4
2 机器人传感器的要求和选择 4
3 内部传感器(位移传感器、角数字编码器) 4
4 外部传感器(力觉传感器、触觉传感器、接近觉传感器、滑觉传感器、视觉传感器、听觉传感器、嗅觉传感器、味觉传感器) 本章首先介绍了机器人常用传感器的分类,要求及选择;然后分别对机器人内部传感器和外部传感器工作原理进行了详细的介绍
1 机器人常用传感器的分类 机器人的控制系统相当于人类大脑,执行机构相当于人类四肢,传感器相当于人类的五官
因此,要让机器人像人一样接收和处理外界信息,机器人传感器技术是机器人智能化的重要体现
传感器是机器人完成感觉的必要手段,通过传感器的感觉作用,将机器人自身的相关特性或相关物体的特性转化为机器人执行某项功能时所需要的信息
根据传感器在机器人上应用的目的和使用范围不同,可分为内部传感器和外部传感器
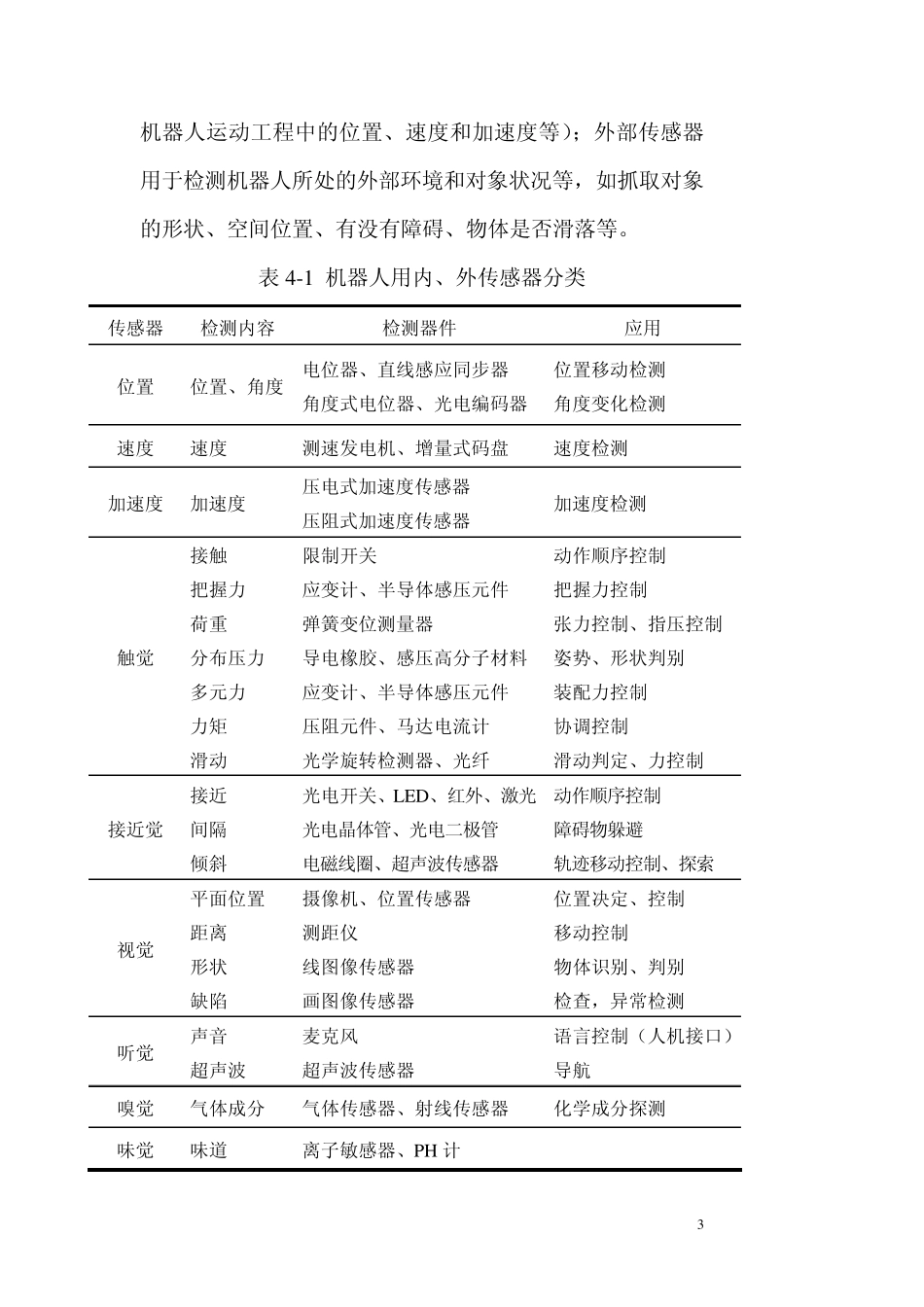
内部传感器用于检测机器人自身状态(如手臂间角度、 3 机器人运动工程