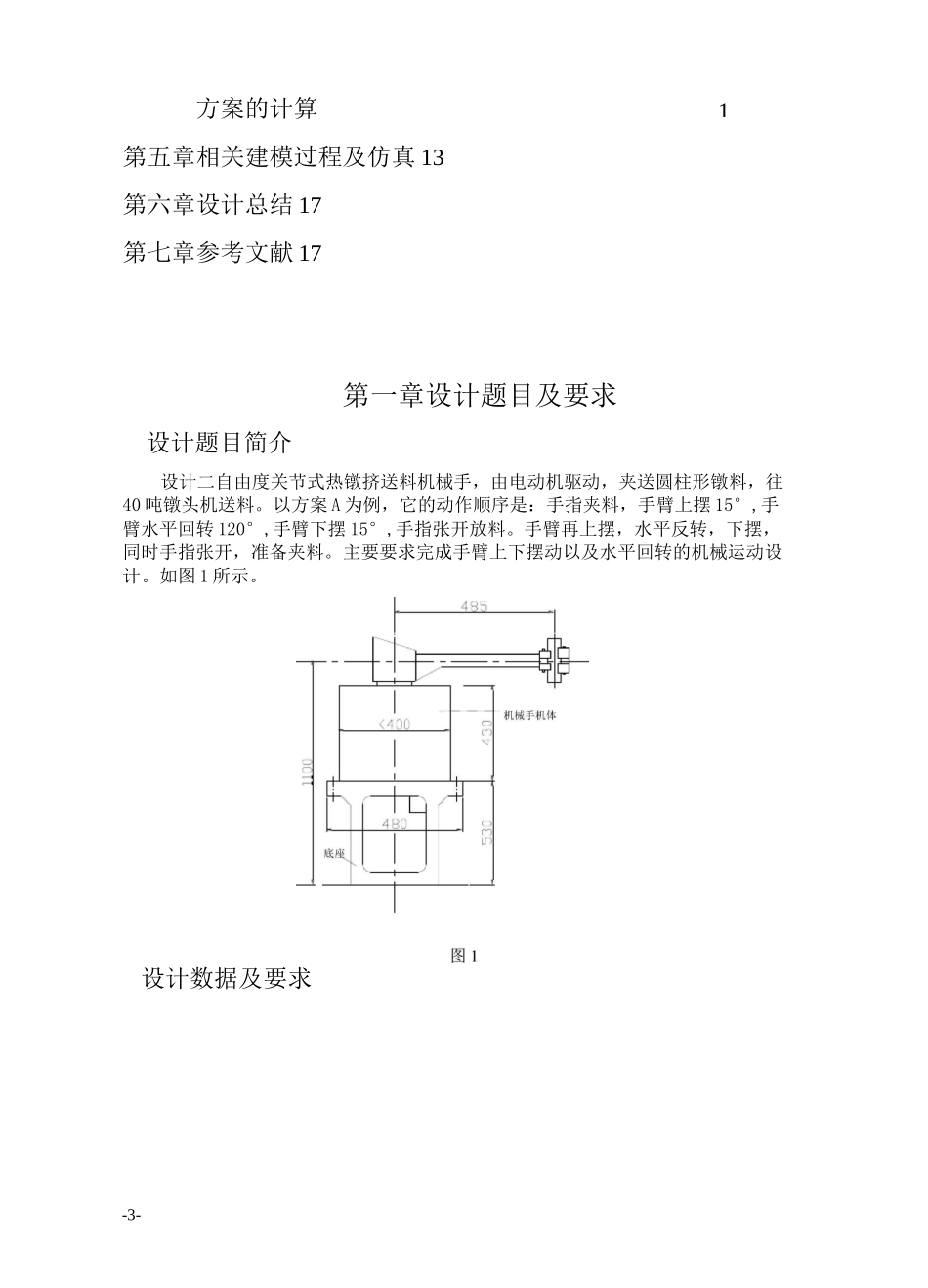
-1-机械原理课程设计说明书热镦挤送料机械手 C目录第一章设计题目及要求设计题目简介 3设计数据及要求 3设计任务与提示 4第二章热镦挤送料机械手摆臂的设计摆臂方案 A 的设计 4摆臂方案 B 的设计 5摆臂方案的确定 6第三章热镦挤送料机械手回转装置设计回转装置 A 的设计 6回转装置 B 的设计 7驱动装置的选择 8回转装置方案的确定 9循环图的拟定 9第四章热镦挤送料机械手方案的确定与计算方案的拟定 9-2-最终方案的确定与说明 10-3-1方案的计算第五章相关建模过程及仿真 13第六章设计总结 17第七章参考文献 17第一章设计题目及要求设计题目简介设计二自由度关节式热镦挤送料机械手,由电动机驱动,夹送圆柱形镦料,往40 吨镦头机送料
以方案 A 为例,它的动作顺序是:手指夹料,手臂上摆 15°,手臂水平回转 120°,手臂下摆 15°,手指张开放料
手臂再上摆,水平反转,下摆,同时手指张开,准备夹料
主要要求完成手臂上下摆动以及水平回转的机械运动设计
如图 1 所示
设计数据及要求-4-、
>万案号最大抓重kg手指夹持工件最大直径mm手臂回转角度(°)手臂回转半径mm手臂上下摆动角度(°)送料频率次/min电动机转速 r/minC2251506501815960设计任务与提示1
至少提出可行的两种运动方案,然后进行方案分析评比,选出一种运动方案进行设计;2
设计传动系统并确定其传动比分配
图纸上画出步进送料机的机构运动方案简图和运动循环图
对平面连杆机构进行尺度综合,并进行运动分析;验证输出构件的轨迹是否满足设计要求;求出机构中输出件的速度、加速度;画出机构运动线图
5•用软件(VB、MATLAB、ADAMS 或 SOLIDWORKS 等均可)对执行机构进行运动仿真,并画出输出机构的位移、速度、和加速度线图
编写设计计算说明书,其中应包括设