EPSON 机械手脉冲零点校正 一、工具:钢板尺(或卡尺)、EPSON 机械手编程软件 RC+5、0 等
二、应用场合:1、当机械手与驱动器得型号及序列号不一致时, 即机械手与不同序列号得控制器混搭使用,需要重新校准机械手得位置(重新校准机械手脉冲零位)
2、更换马达等其她问题
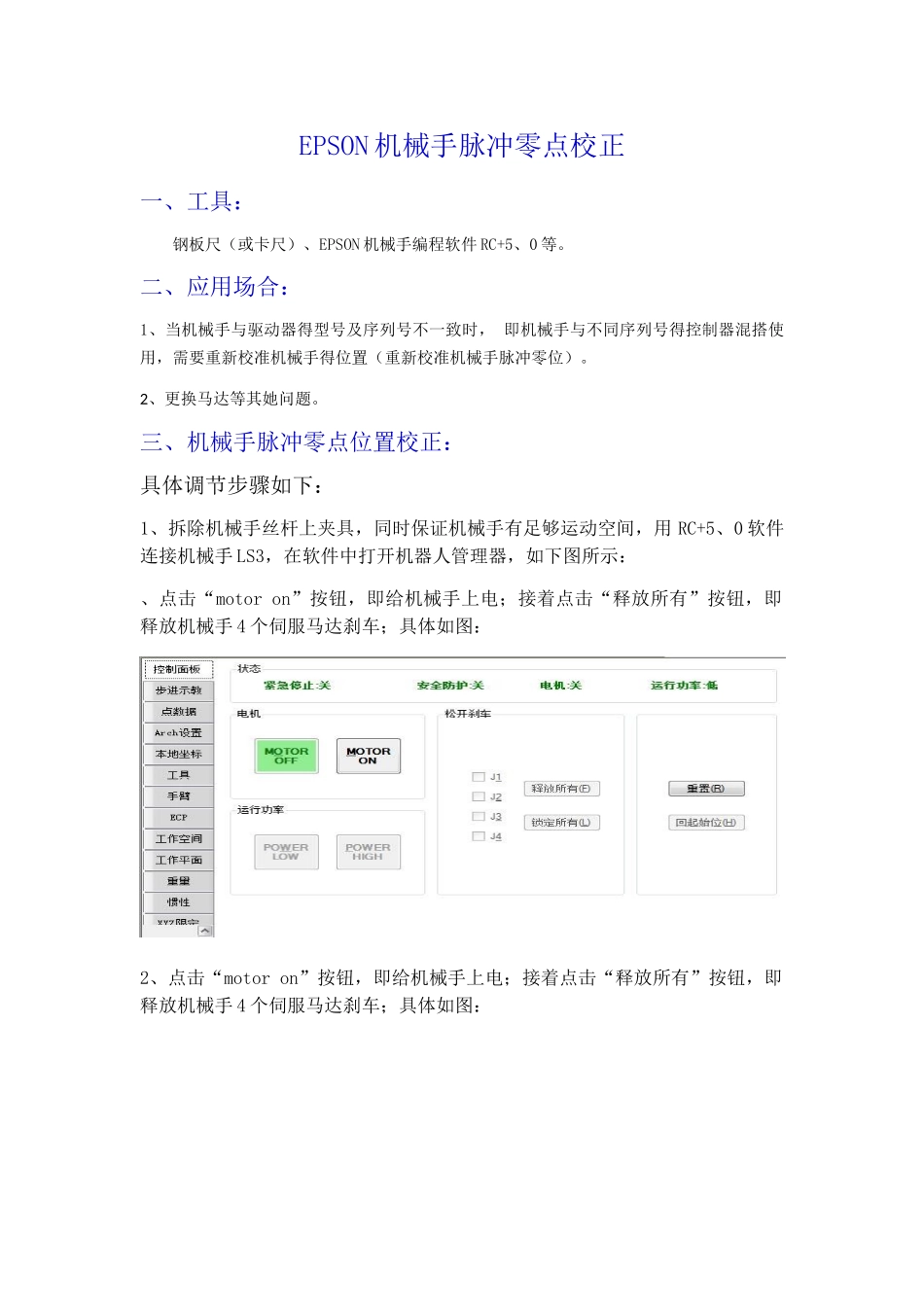
三、机械手脉冲零点位置校正:具体调节步骤如下:1、拆除机械手丝杆上夹具,同时保证机械手有足够运动空间,用 RC+5、0 软件连接机械手 LS3,在软件中打开机器人管理器,如下图所示:、点击“motor on”按钮,即给机械手上电;接着点击“释放所有”按钮,即释放机械手 4 个伺服马达刹车;具体如图:2、点击“motor on”按钮,即给机械手上电;接着点击“释放所有”按钮,即释放机械手 4 个伺服马达刹车;具体如图:3
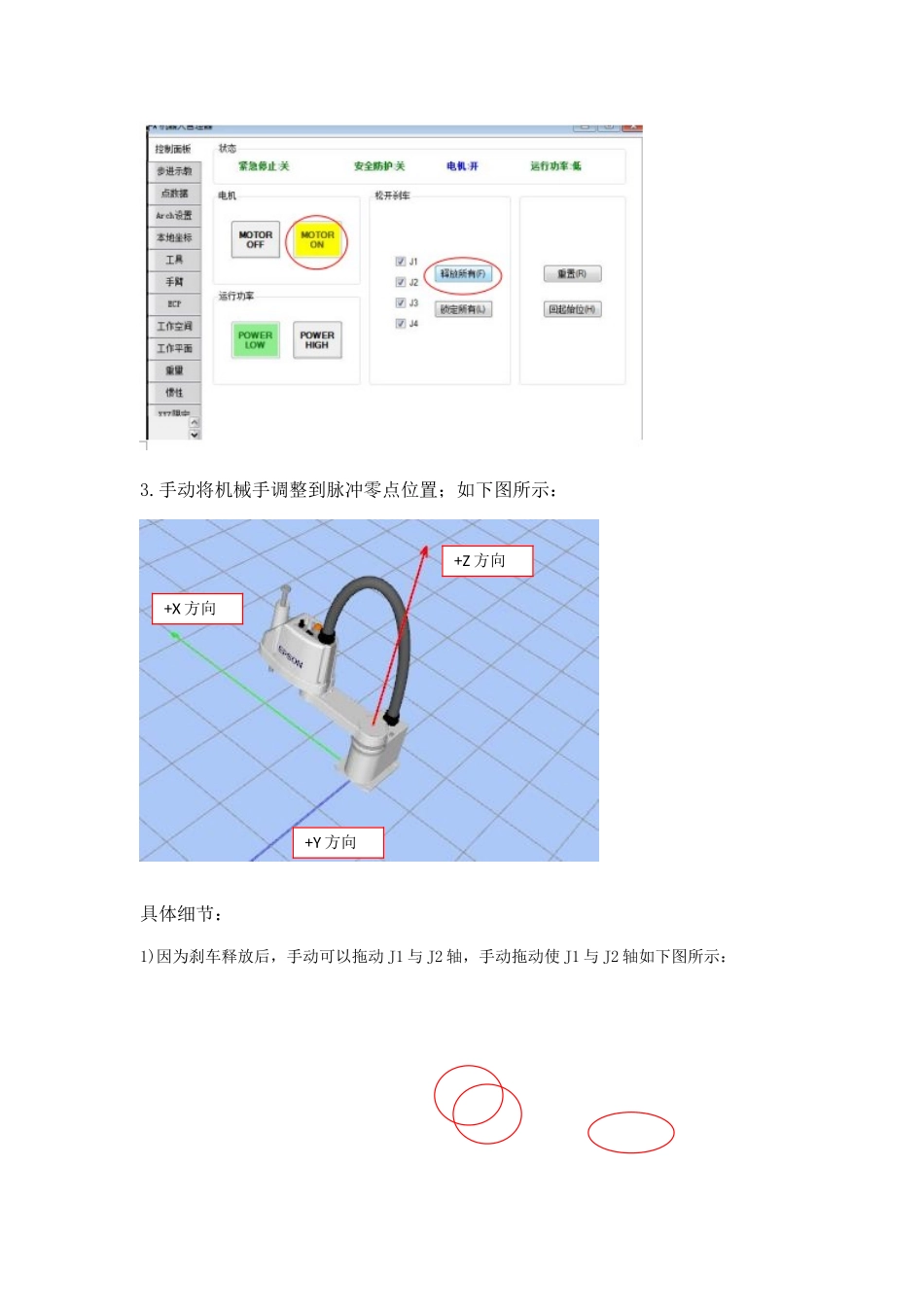
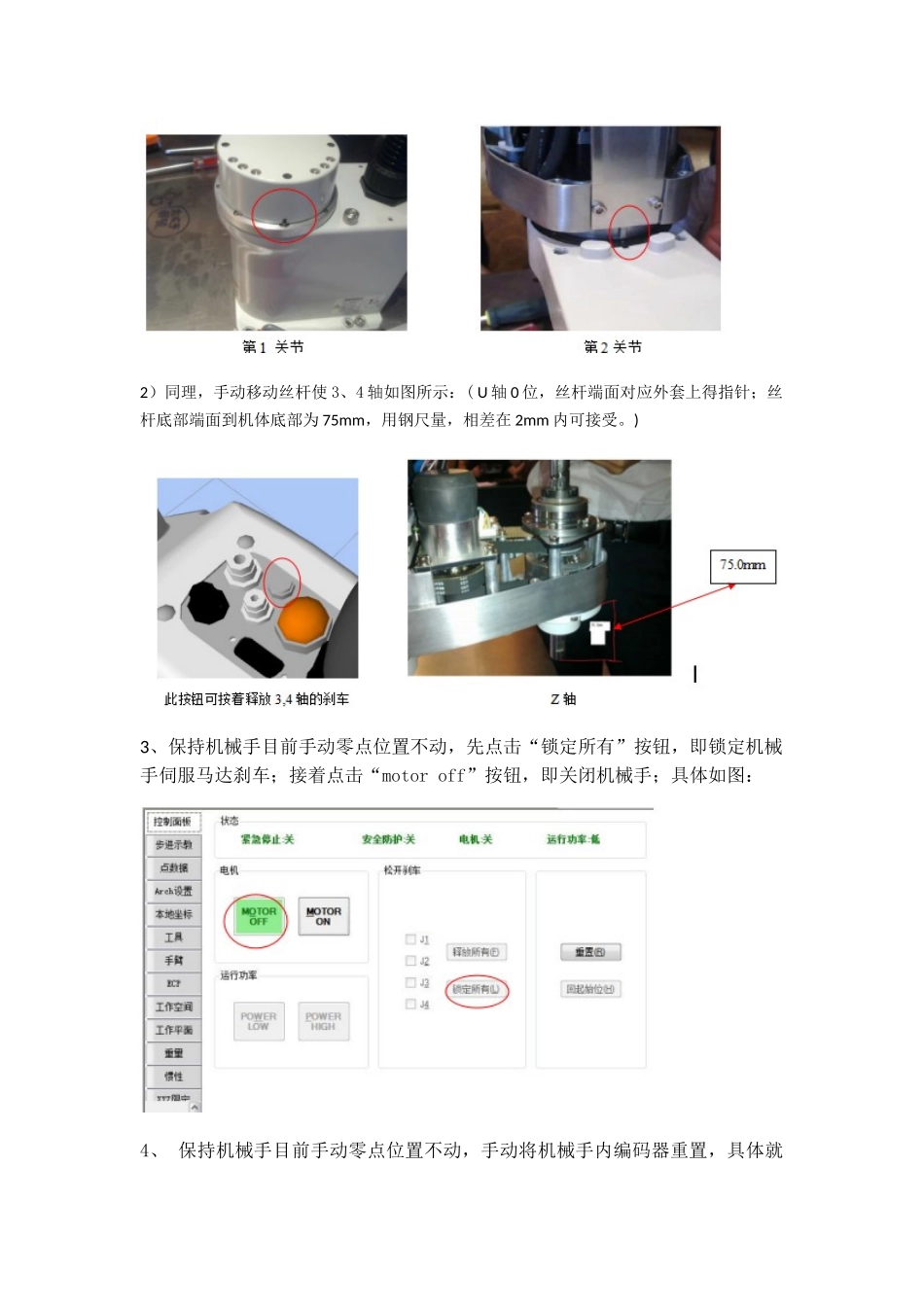
手动将机械手调整到脉冲零点位置;如下图所示:具体细节:1)因为刹车释放后,手动可以拖动 J1 与 J2 轴,手动拖动使 J1 与 J2 轴如下图所示:+X 方向+Y 方向+Z 方向2)同理,手动移动丝杆使 3、4 轴如图所示:( U 轴 0 位,丝杆端面对应外套上得指针;丝杆底部端面到机体底部为 75mm,用钢尺量,相差在 2mm 内可接受
)3、保持机械手目前手动零点位置不动,先点击“锁定所有”按钮,即锁定机械手伺服马达刹车;接着点击“motor off”按钮,即关闭机械手;具体如图:4、 保持机械手目前手动零点位置不动,手动将机械手内编码器重置,具体就是在软件中打开命令窗口(ctrl+M)中输入:Encreset 1 按回车Encreset 2 按回车Encreset 3 按回车Encreset 3,4 按回车 如图:5、 保持机械手目前手动零点位置不动,重启控制器,具体操作如图:6、 保持机械手目前手动零点位置不动,在命令窗口中输入 Calpls(脉冲零点位置得正确脉冲值) 回