Adams 与 Matlab 联合仿真例子作者寄语:这个文件是基于李增刚《adams 入门详解与实例》一书中,Adams与 Matlab 联合仿真的例子,以及一个名为《2025 版 ADAMS 与 Matlab 联合仿真(绝对正确版)》的 pdf 文件上修改来,为了方便起见,用了一些复制、粘贴,所以中间的一些过程会和这两个文件有所重合,不要惊讶,也不要吐槽
做这个例子的目的,是站在一个普通学习者的角度,介绍联合仿真,和众多学习 adams 的人共勉
我的结论是:以上两个例子中的结果并不矛盾,都是正确的,基本上看了我的例子后,他们的也就懂了
李增刚 第 236 页开始
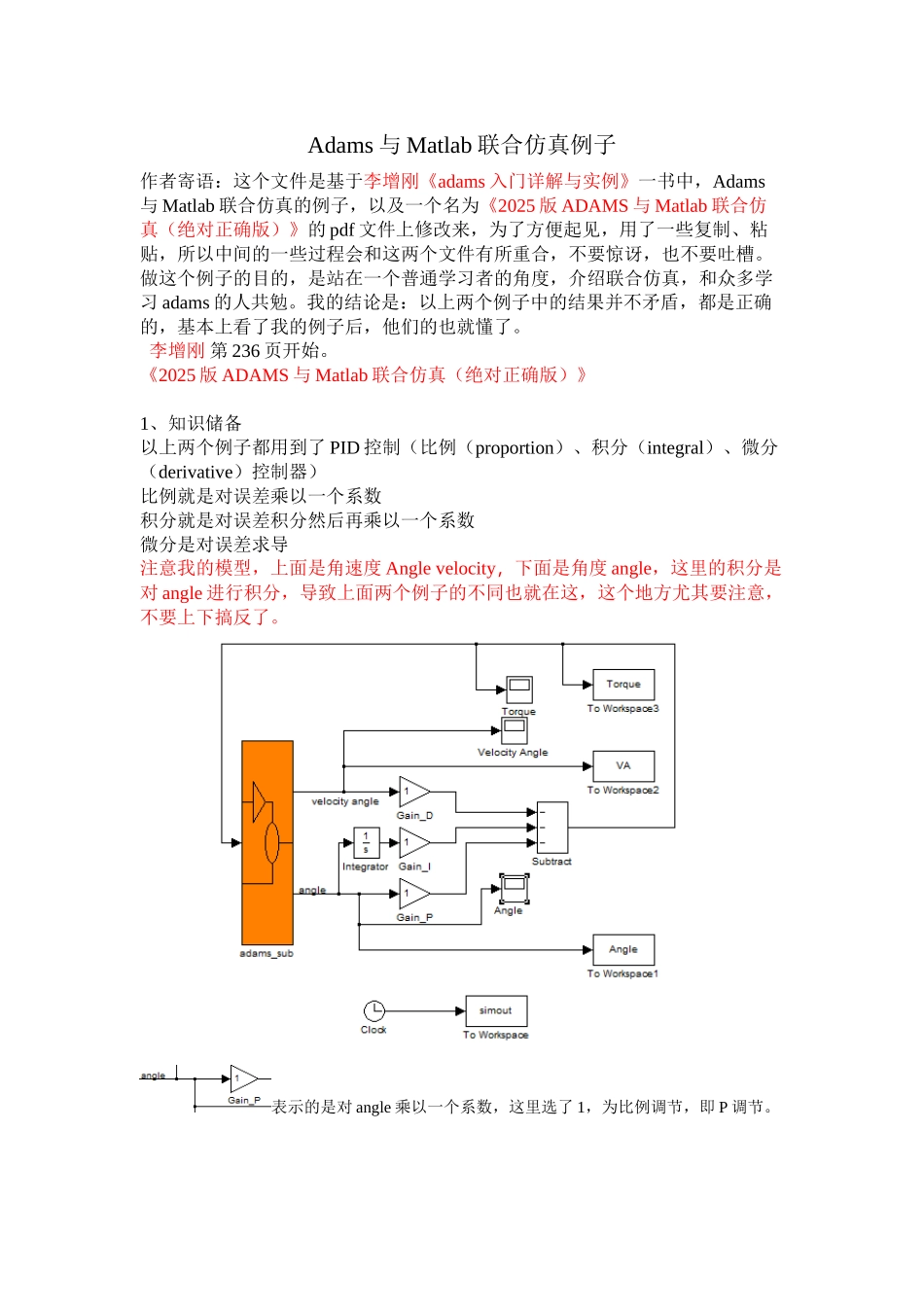
《2025 版 ADAMS 与 Matlab 联合仿真(绝对正确版)》1、知识储备以上两个例子都用到了 PID 控制(比例(proportion)、积分(integral)、微分(derivative)控制器)比例就是对误差乘以一个系数积分就是对误差积分然后再乘以一个系数微分是对误差求导注意我的模型,上面是角速度 Angle velocity,下面是角度 angle,这里的积分是对 angle 进行积分,导致上面两个例子的不同也就在这,这个地方尤其要注意,不要上下搞反了
表示的是对 angle 乘以一个系数,这里选了 1,为比例调节,即 P 调节
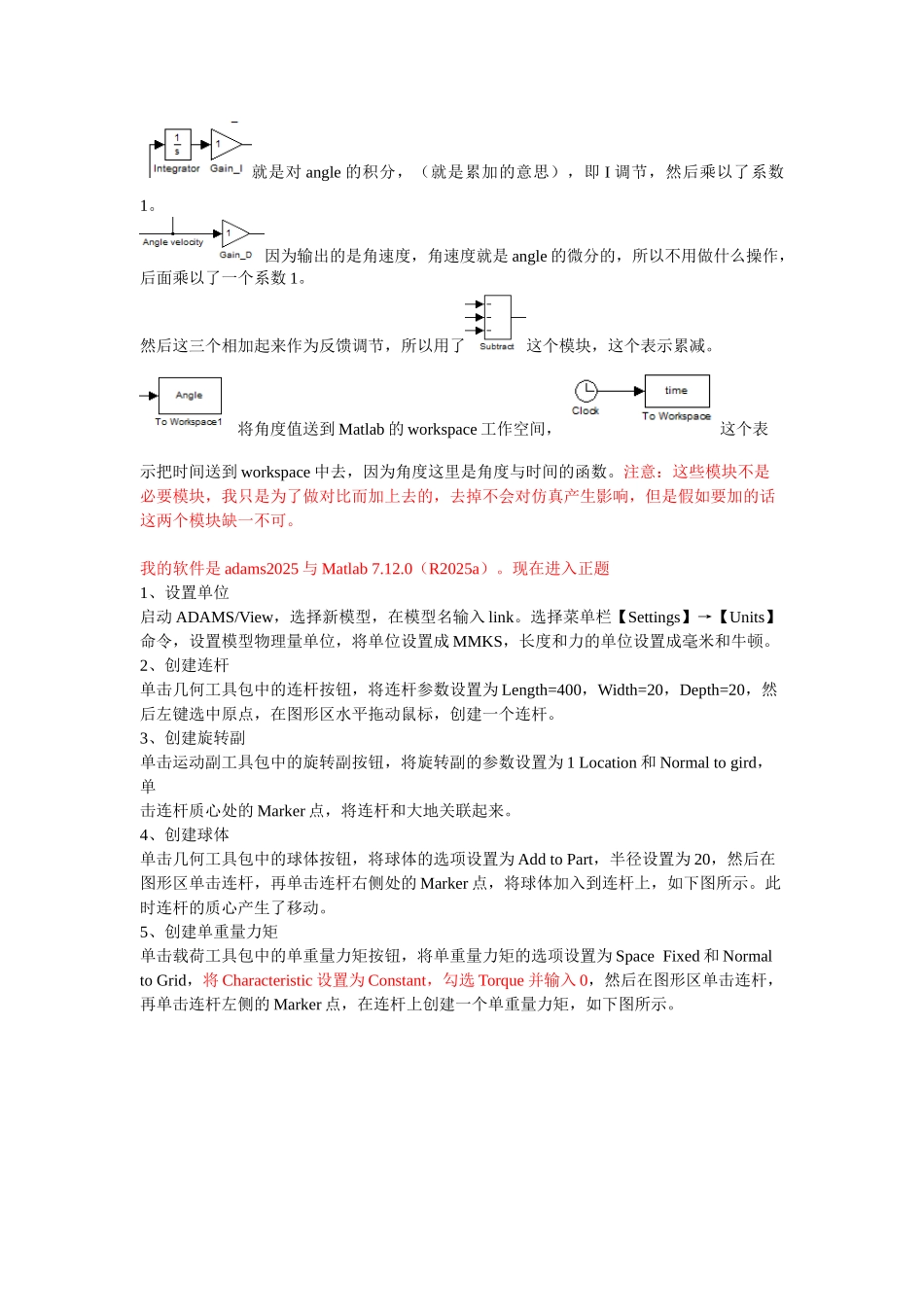
就是对 angle 的积分,(就是累加的意思),即 I 调节,然后乘以了系数1
因为输出的是角速度,角速度就是 angle 的微分的,所以不用做什么操作,后面乘以了一个系数 1
然后这三个相加起来作为反馈调节,所以用了这个模块,这个表示累减
将角度值送到 Matlab 的 workspace 工作空间,这个表示把时间送到 workspace 中去,因为角度这里是角度与时间的函数
注意:这些模块不是必要模块,我只是为了做对比而加上去的,去掉不会对仿真产生影响,但是假如