实验(4)机器人机器人静力学与雅克比实验一、实验目得:1) 理解机器人角速度得相关概念;2) 对构建得机器人进行速度分析;3) 了解与熟悉机器人雅克比矩阵得含义,4) 能够使用 simul i nk 构建机器人仿真模型.二、雅克比矩阵图 1 机器人雅克比矩阵在机器人学中,通常使用雅克比将关节速度与操作臂末端得笛卡尔速度联系起来:在 ma t l ab工具箱中,求取机器人雅克比矩阵函数为,J = p560、j a c o b 0(q r) ,其中 p560 为机器人名
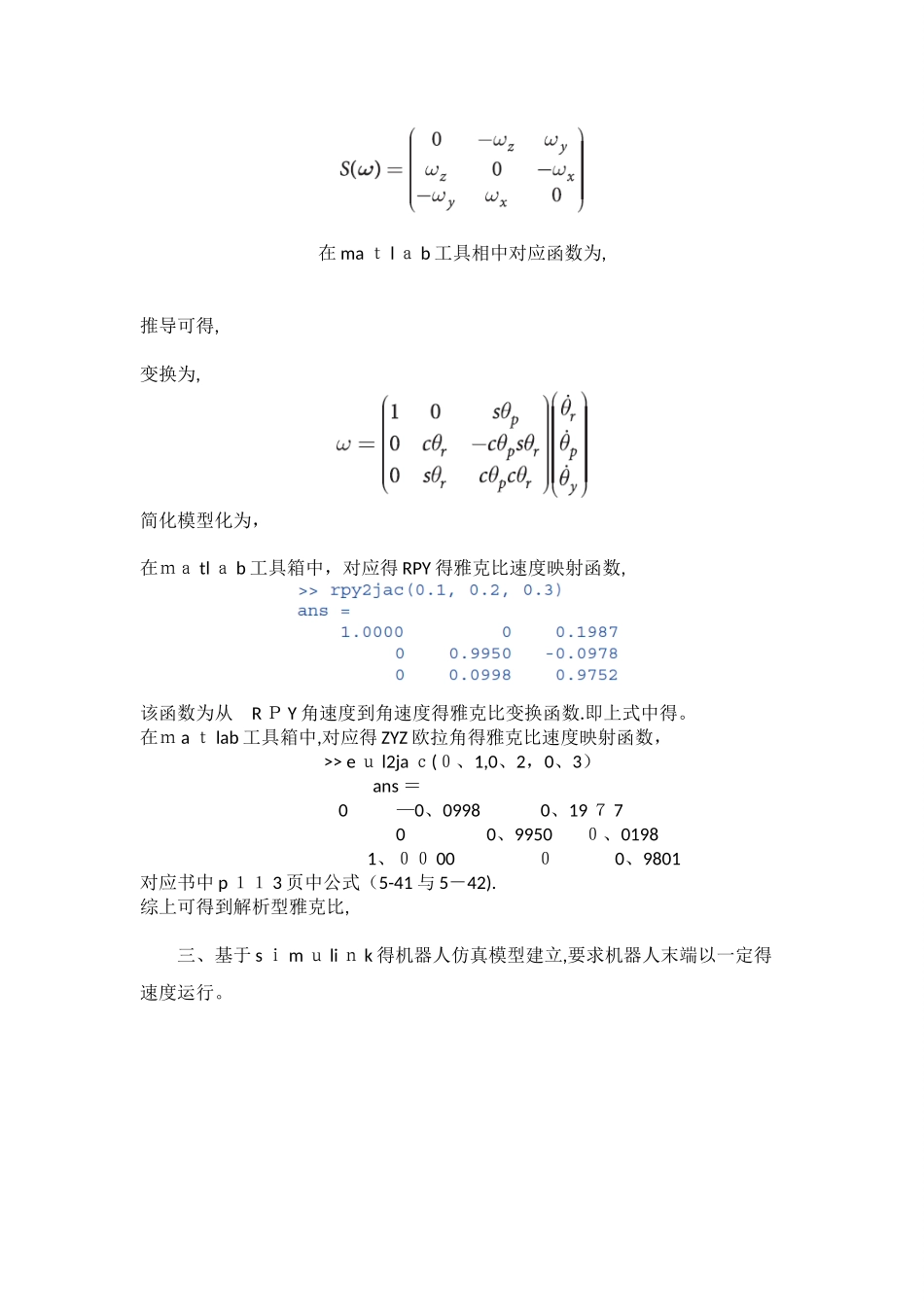
逆雅克比矩阵:分析雅克比矩阵:其中,在 ma t l a b 工具相中对应函数为,推导可得,变换为,简化模型化为,在ma tl a b 工具箱中,对应得 RPY 得雅克比速度映射函数,该函数为从 R P Y 角速度到角速度得雅克比变换函数
在m a t lab 工具箱中,对应得 ZYZ 欧拉角得雅克比速度映射函数,>> e u l2ja c(0、1,0、2,0、3)ans = 0 —0、0998 0、19 7 7 0 0、9950 0、0198 1、00 00 0 0、9801对应书中 p 11 3 页中公式(5-41 与 5-42)
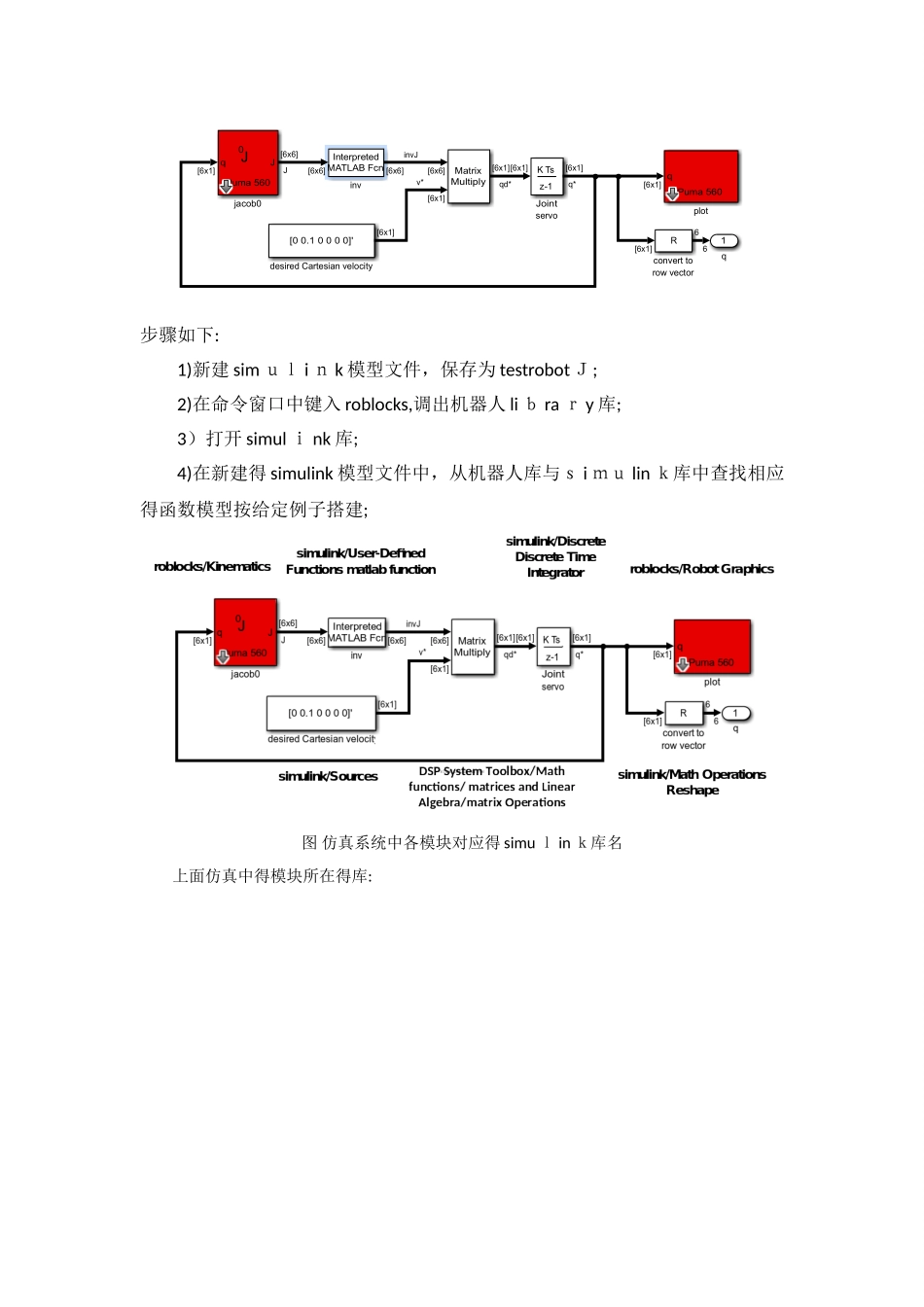
综上可得到解析型雅克比,三、基于 s i m u li n k 得机器人仿真模型建立,要求机器人末端以一定得速度运行
1q6qPuma 560plot[6x1]J0Puma 560qJjacob0[6x6][6x1]InterpretedMATLAB Fcninv[6x6][6x6][0 0
1 0 0 0 0]'desired Cartesian velocity[6x1]Rconvert torow vector6[6x1]MatrixMultiply[6x1][6x1][6x6]K Tsz-1Joint servo[6x1][6x1]Jqd*q*inv