1DF50K02顶梁焊接加工、前言1、TEACH模式下设置和检查焊枪焊枪作为工业机器人的“工具”,具有固定的几何形状
焊枪安装在工业机器人上,机器人可以携带焊枪驶向工件上的点,也可以利用焊枪的运动在程序中编写这些点
如果焊枪发生碰撞后弯曲变形,必须进行矫正
否则焊丝尖将会出现偏离
焊枪在一个矫正规上接受矫正
出现下列情况必须对焊枪进行检查,必要时重新校准:在与工件发生碰撞后;在编制一个新程序前;在保养时;在更换焊枪时
□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□□、在移动焊枪时,首先观察坐标系,模式下,我们常用的模式是坐标系,及坐标系
如果以弧形运动()驶过焊缝,则存在与工件发生碰撞的危险
为此应选择直线运动方式()3、修改完程序后,在编辑状态下离开文本编辑器为了执行一个程序流程,计算机需要一个经过翻译的程序版本(中间代码)
如果通过“确认”按键离开文本编辑器,这样的翻译过程(编译)将自动进行
对程序所做的修改将被保存
如果通过“中止”按键离开文本编辑器,控制系统会询问是否要保存修改内容
回答否后,修改内容被放弃
确认离开文本编辑器,同时对程序文本进行编译
对程序所做的修改将被保存还有一项任务是检查程序是否有所谓的“句法错误”
编译器不能确定导致顺序程序出错(例如:碰撞)的错误
待修正的程序行显示为红色
如果通过“中止”按键离开文本编辑器,控制系统会询问是否要保存修改内容
回答否后,修改内容被放弃
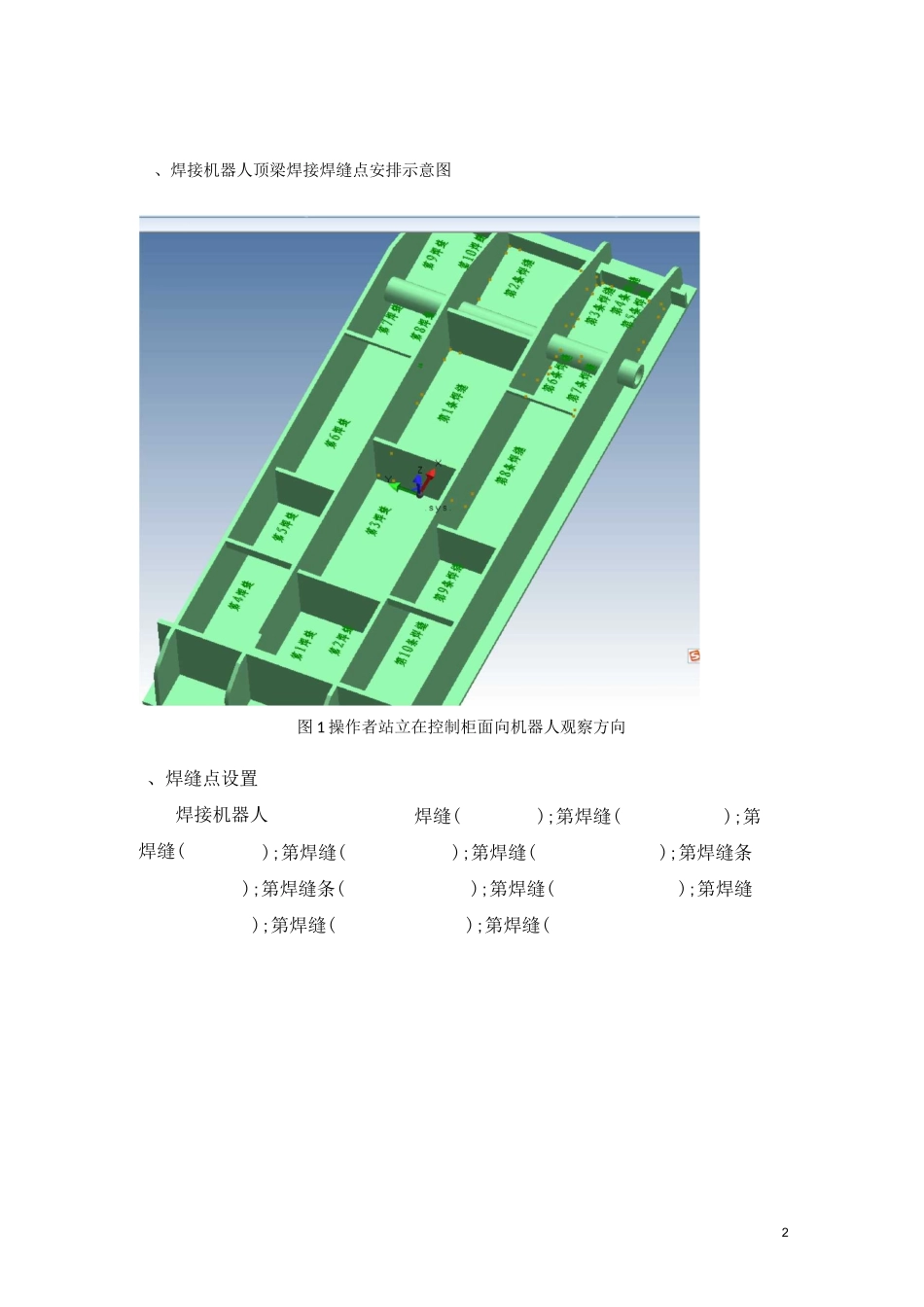
2、焊接机器人顶梁焊接焊缝点安排示意图图1操作者站立在控制柜面向机器人观察方向、焊缝点设置焊接机器人焊缝();第焊缝();第焊缝();第焊缝();第焊缝();第焊缝条);第焊缝条();第焊缝();第焊缝);第焊缝();第焊缝(Ih二l1r©■T-—3图2A机器人第1
3焊缝点示意图焊接机器人(第条焊缝();第条焊缝条();第条焊缝();第条焊