InstituteofAdvancedManufactureEngineeringofZheJiangUniversity《计算机数字控制技术》第六讲第六讲计算机数字控制器的离散化设计计算机数字控制器的离散化设计主讲:王文2025年1月1日星期三InstituteofAdvancedManufactureEngineeringofZheJiangUniversity数字控制系统的脉冲传递函数6
1最小拍随动系统6
2最小拍随动系统数字控制器设计6
3纯滞后控制技术――大林算法6
4主要内容数字控制器D(Z)的实现6
5InstituteofAdvancedManufactureEngineeringofZheJiangUniversity6
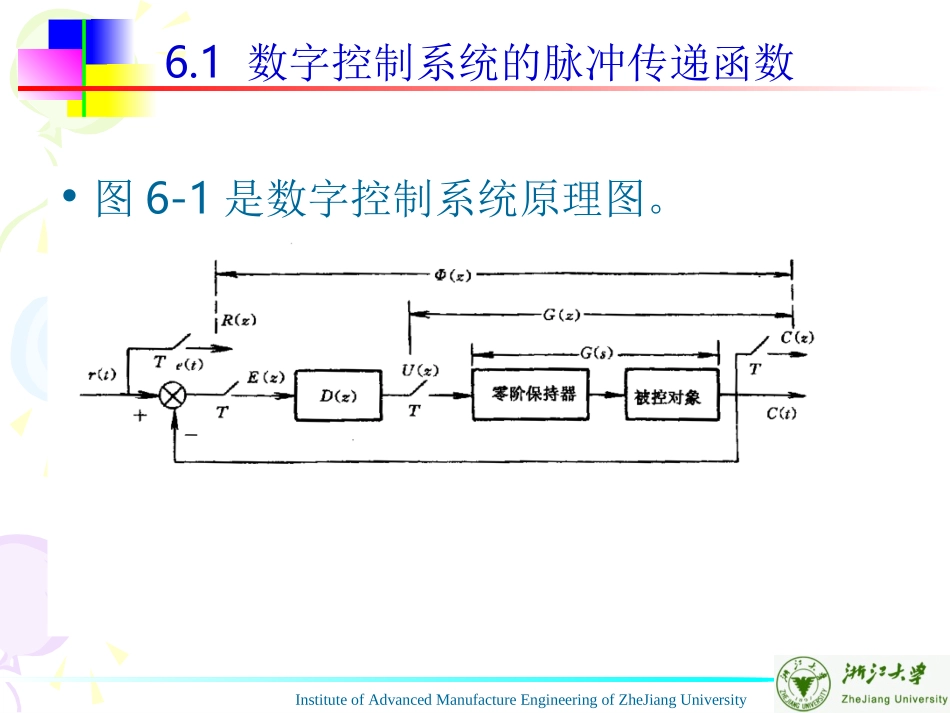
1数字控制系统的脉冲传递函数•图6-1是数字控制系统原理图
InstituteofAdvancedManufactureEngineeringofZheJiangUniversity•在图6-1中,设C(z)为输入信号的Z变换,R(z)为输出信号的Z变换,D(z)为数字控制器的脉冲传递函数,G(z)为包括零阶保持器在内的广义对象的脉冲传递函数,为闭环脉冲传递函数,由数字控制器理论可知,系统的闭环脉冲传递函数应为)()(1)()()(zGzDzGzDz)(z)(z(6-1)InstituteofAdvancedManufactureEngineeringofZheJiangUniversity•根据式(6-1),可求出数字控制器的为•式(6-2)是我们分析和设计数字控制器的基础及基本数学模型
)](1)[()()()()(zzGzzEzUzD(6-2))(zDInstituteofAdvancedManufactureEngineeringofZheJiangUniversity6
2最小拍随动系统•在自动调节系统