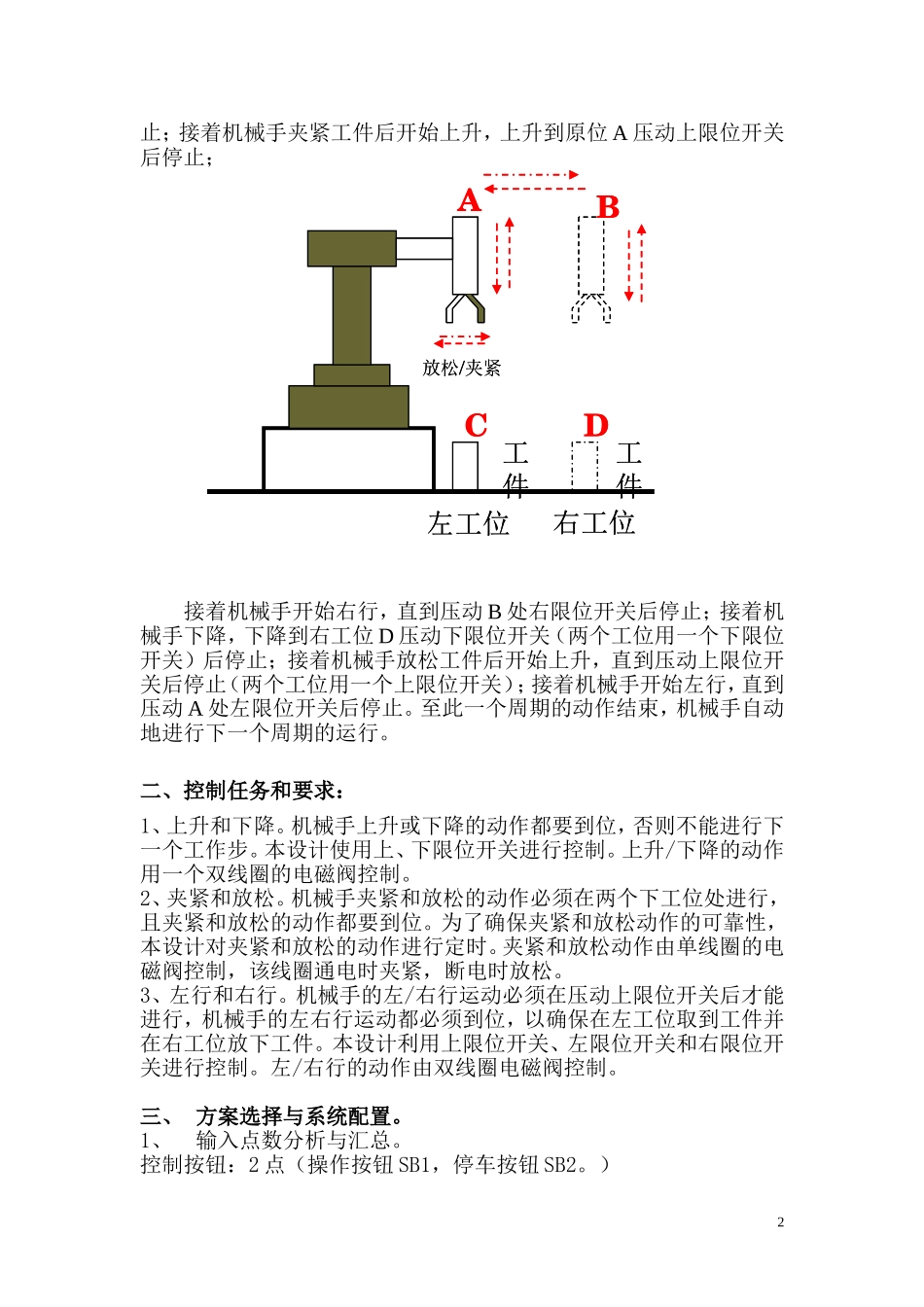
课程设计任务书课程设计(作业)题目:搬运机械手的PLC控制学生姓名:学号:入学时间:年季专业:直属/分校:指导教师:大连广播电视大学2012年5月一、任务描述:采用液压控制的搬运机械手,其任务是把左工位C的工件搬运到右工位D,下图是其动作示意图
启动后机械手周期性连续运行:即开始时,机械手在原位A压左限位开关和上限位开关,当按一次操作按钮后机械手开始下降,下降到左工位C压动下限位开关后下降停1中央广播电视大学开放教育试点和人才模式改革(本科)集中社会实践止;接着机械手夹紧工件后开始上升,上升到原位A压动上限位开关后停止;左工位右工位工件工件DABC放松/夹紧左工位右工位工件工件DABC放松/夹紧接着机械手开始右行,直到压动B处右限位开关后停止;接着机械手下降,下降到右工位D压动下限位开关(两个工位用一个下限位开关)后停止;接着机械手放松工件后开始上升,直到压动上限位开关后停止(两个工位用一个上限位开关);接着机械手开始左行,直到压动A处左限位开关后停止
至此一个周期的动作结束,机械手自动地进行下一个周期的运行
二、控制任务和要求:1、上升和下降
机械手上升或下降的动作都要到位,否则不能进行下一个工作步
本设计使用上、下限位开关进行控制
上升/下降的动作用一个双线圈的电磁阀控制
2、夹紧和放松
机械手夹紧和放松的动作必须在两个下工位处进行,且夹紧和放松的动作都要到位
为了确保夹紧和放松动作的可靠性,本设计对夹紧和放松的动作进行定时
夹紧和放松动作由单线圈的电磁阀控制,该线圈通电时夹紧,断电时放松
3、左行和右行
机械手的左/右行运动必须在压动上限位开关后才能进行,机械手的左右行运动都必须到位,以确保在左工位取到工件并在右工位放下工件
本设计利用上限位开关、左限位开关和右限位开关进行控制
左/右行的动作由双线圈电磁阀控制
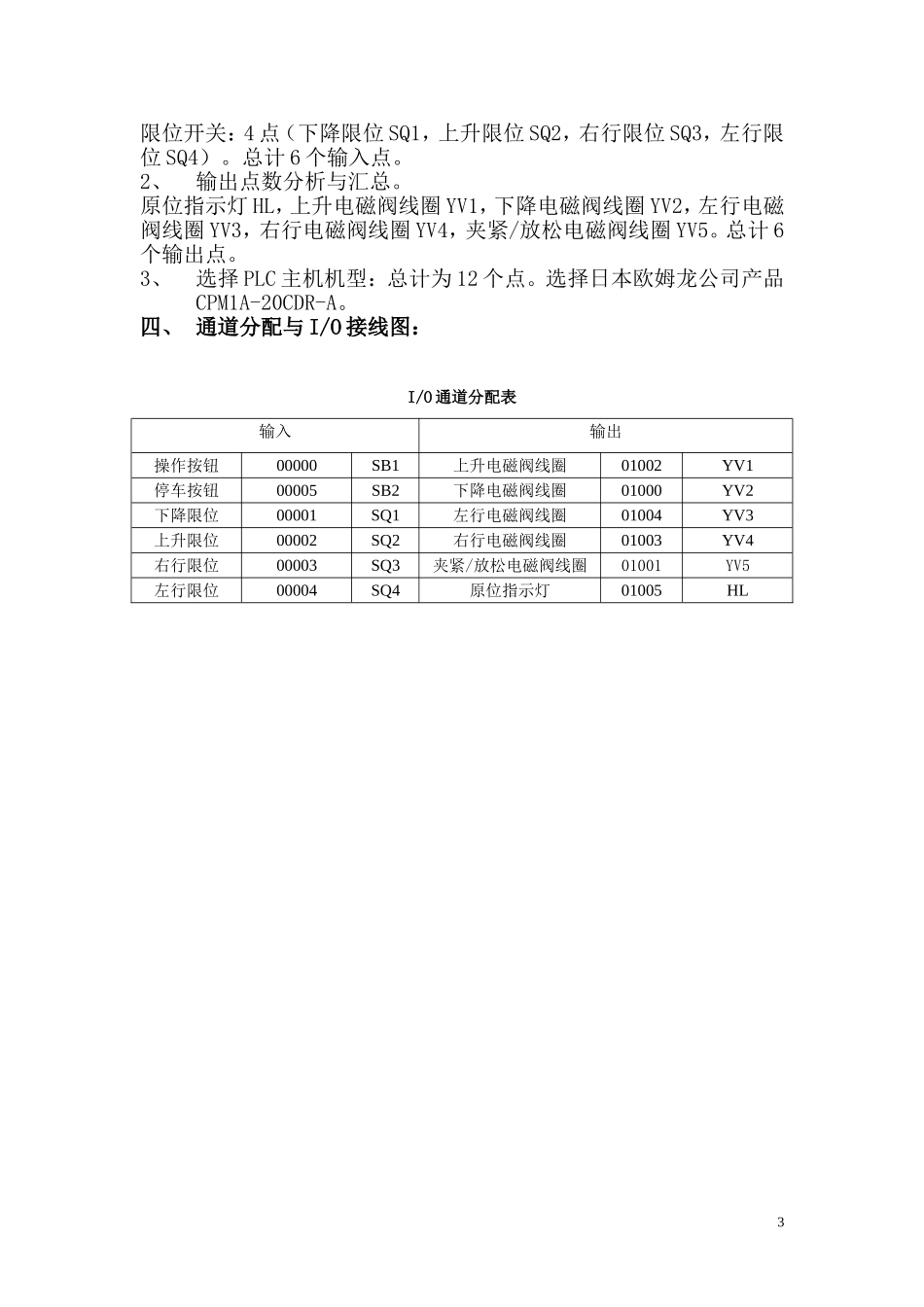
三、方案选择与系统配置
1、输入点数分析与汇总