第四讲 磁电式、复合式等传感器系统原理及应用 第一节 速度(磁电式)传感器系统 速度传感器属于接触式传感器,用来测量轴承座、机壳或者基础的振动
一、工作原理 速度传感器是利用电磁感应原理,将运动速度转换成线圈中的感应电势输出
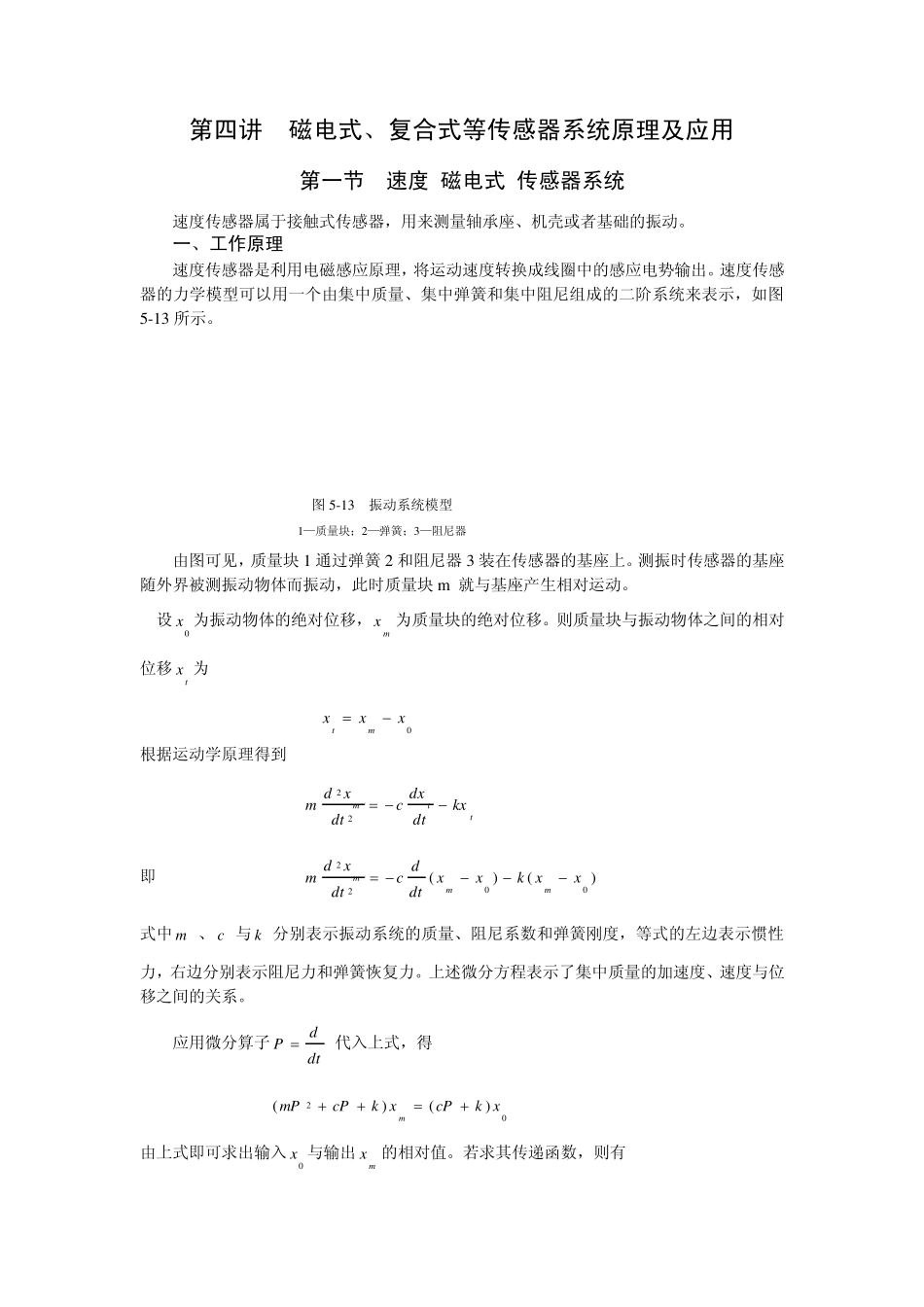
速度传感器的力学模型可以用一个由集中质量、集中弹簧和集中阻尼组成的二阶系统来表示,如图5-13 所示
由图可见,质量块 1 通过弹簧 2 和阻尼器 3 装在传感器的基座上
测振时传感器的基座随外界被测振动物体而振动,此时质量块 m 就与基座产生相对运动
设0x 为振动物体的绝对位移,mx为质量块的绝对位移
则质量块与振动物体之间的相对位移tx 为 0xxxmt 根据运动学原理得到 ttmkxdtdxcdtxdm22 即 )()(0022xxkxxdtdcdtxdmmmm 式中 m 、 c 与 k 分别表示振动系统的质量、阻尼系数和弹簧刚度,等式的左边表示惯性力,右边分别表示阻尼力和弹簧恢复力
上述微分方程表示了集中质量的加速度、速度与位移之间的关系
应用微分算子dtdP 代入上式,得 02)()(xkcPxkcPmPm 由上式即可求出输入0x 与输出mx的相对值
若求其传递函数,则有 图 5-13 振动系统模型 1—质量块;2—弹簧;3—阻尼器 kcPmPkcPPxxm20)( 或 20022002)(PPPPxxxm 式中 mkc2——阻尼比; mk0——振动系统的固有频率
当振动物体作简谐振动时,即当输入信号为正弦波时,以jP 代入上式,即可得到频率响应函数为 )(2)(1)()(0202000jjxxxm 上式为复频函数,其振幅比 B 为 2022020000])(2[])(1[)(xxxxxBmt 令 0 ——频