1第四章线性判别函数 4
0 引言 4
1 Fisher线性判别 4
2 最小平方误差准则 4
3 最小错分样本数准则 4
4 线性支撑向量机(SVM)24
0 引言34
0 引言 Bayes决策尽管是最优决策,但实现困难
模式识别的任务是分类,可直接设计判别函数—即分类面
最简单的判别函数是线性函数,相应的分类面是超平面
0 引言 线性判别函数(两类):是分类面方程;是分类面的法向量;是分类面的偏移; 设计线性分类器的关键是给出估计的准则
+=2100)(ωωbxwxgTwb0)(=xg,w b54
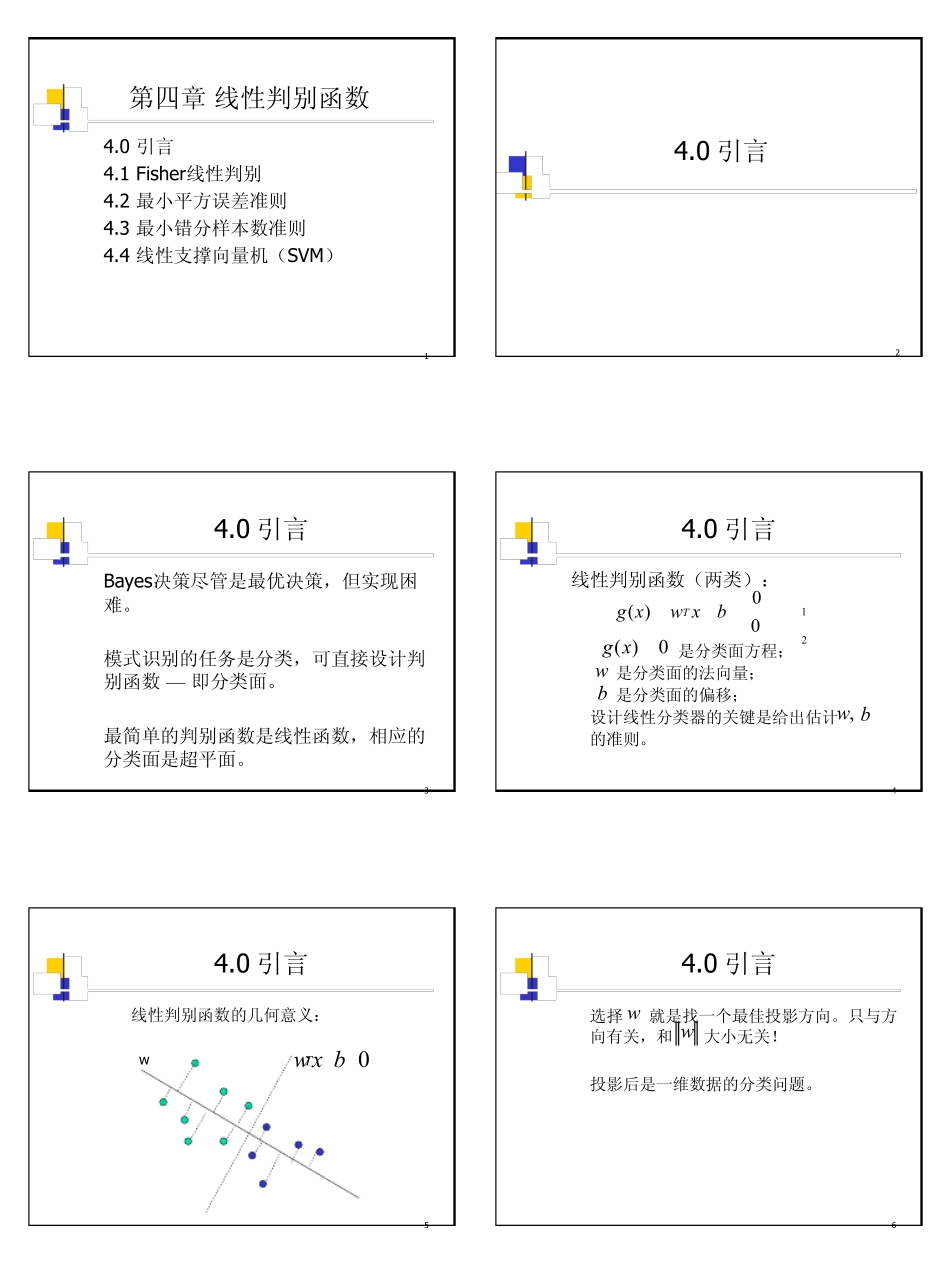
0 引言 线性判别函数的几何意义:w0=+bxwT64
0 引言 选择就是找一个最佳投影方向
只与方向有关,和大小无关
投影后是一维数据的分类问题
1 Fisher线性判别84
1 Fisher线性判别 Fisher判别的基本思想:希望投影后的一维数据满足: 两类之间的距离尽可能远; 每一类自身尽可能紧凑
准则的描述: 用投影后数据的统计性质—均值和离散度的函数作为判别优劣的标准
1 Fisher线性判别 符号含义:——两类(原始)数据的均值向量
分别表示两类(原始)数据的离散度矩阵
分别表示两类(投影后,一维)数据的均值
分别表示两类(投影后,一维)数据的离散度
21,µµ21,σσ21,mm21,SS104
1Fisher线性判别()2,1))((=−−∑=imxmxSTiii2,11=∑=ixNmi•均值向量和离散度矩阵114
1 Fisher线性判别 原始数据与做方向投影后数据统计量之间的关系:w,iTimw=µ
))(()(22wSwwmxmxwxwiTTiiTiTi=−−=−=∑∑µσ124
1 Fisher线性判别 Fisher准则函数:
)()(222122