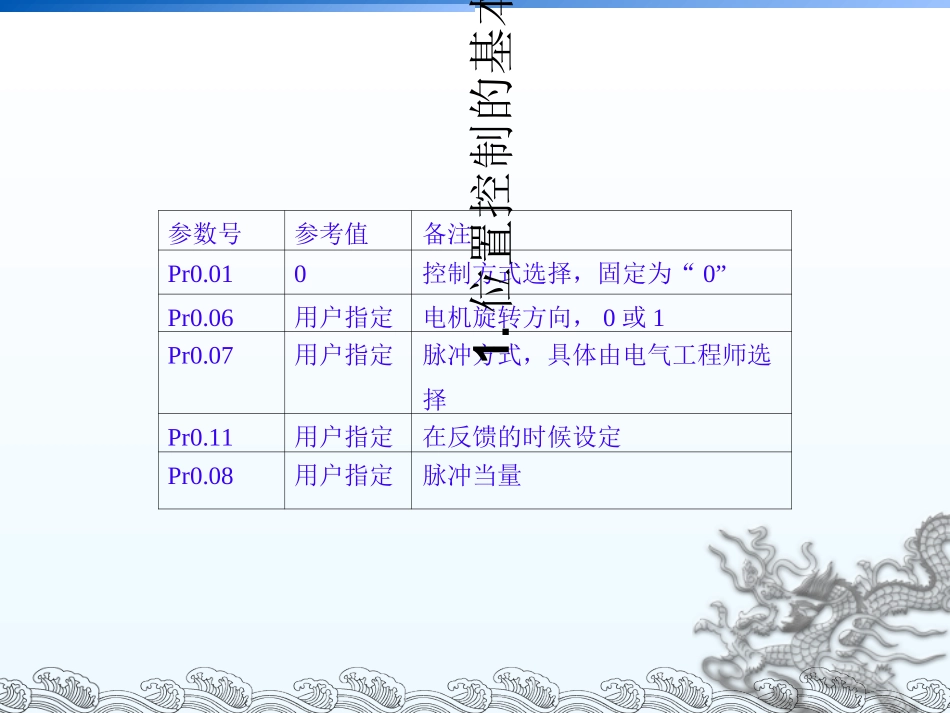
一.基本参数调节其实伺服电机我们所说的基本调节就是要确定下面几个方面的问题:控制方式(一共有三种)●位置控制●速度控制●转矩控制参数号参考值备注Pr0
010控制方式选择,固定为“0”Pr0
06用户指定电机旋转方向,0或1Pr0
07用户指定脉冲方式,具体由电气工程师选择Pr0
11用户指定在反馈的时候设定Pr0
08用户指定脉冲当量1
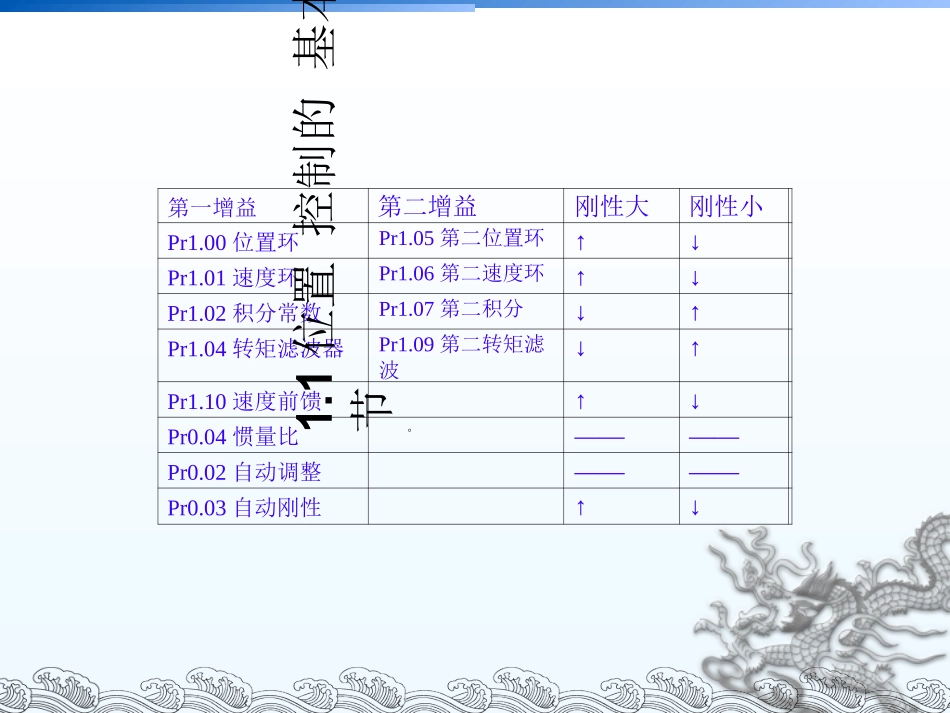
位置控制的基本参数调节第一增益第二增益刚性大刚性小Pr1
00位置环Pr1
05第二位置环↑↓Pr1
01速度环Pr1
06第二速度环↑↓Pr1
02积分常数Pr1
07第二积分↓↑Pr1
04转矩滤波器Pr1
09第二转矩滤波↓↑Pr1
10速度前馈↑↓Pr0
04惯量比————Pr0
02自动调整————Pr0
03自动刚性↑↓1
1位置控制的基本参数调节
参数号参考值备注Pr0
011控制方式选择,固定为“1”Pr3
02用户指定电压增益,单位(R/V)Pr3
03用户指定电机旋转方向取反Pr4
22用户指定零漂Pr0
11用户指定反馈脉冲数2
速度控制的基本参数调节第一增益第二增益刚性大刚性小备注Pr1
00位置环Pr1
05第二位置环无效无效Pr1
01速度环Pr1
06第二速度环↑↓Pr1
02积分常数Pr1
07第二积分↓↑Pr1
04转矩滤波器Pr1
09第二转矩滤波↓↑Pr1
10速度前馈无效无效Pr0
04惯量比————Pr0
02自动调整————Pr0
03自动刚性↑↓2
1速度控制的基本参数调节参数号参考值备注Pr0
012控制方式选择,固定为“2”Pr3
18用户指定转矩指令选择Pr3
19用户指定转矩指令增益,单位(×0
1V/100%)Pr3
20用户指定电机旋转逻辑取反,Pr0
11用户指定反馈脉冲数Pr3
21用户设置转矩模式速度限制3
转矩控制的基本参数调节第一增益第二增益刚性大刚性小备注Pr1