上海步科自动化 AT 部 CX9020 与 KICNO伺服 CANOPEN 配置说明 李勇 2015/1/27 上海步科自动化AT 部 1
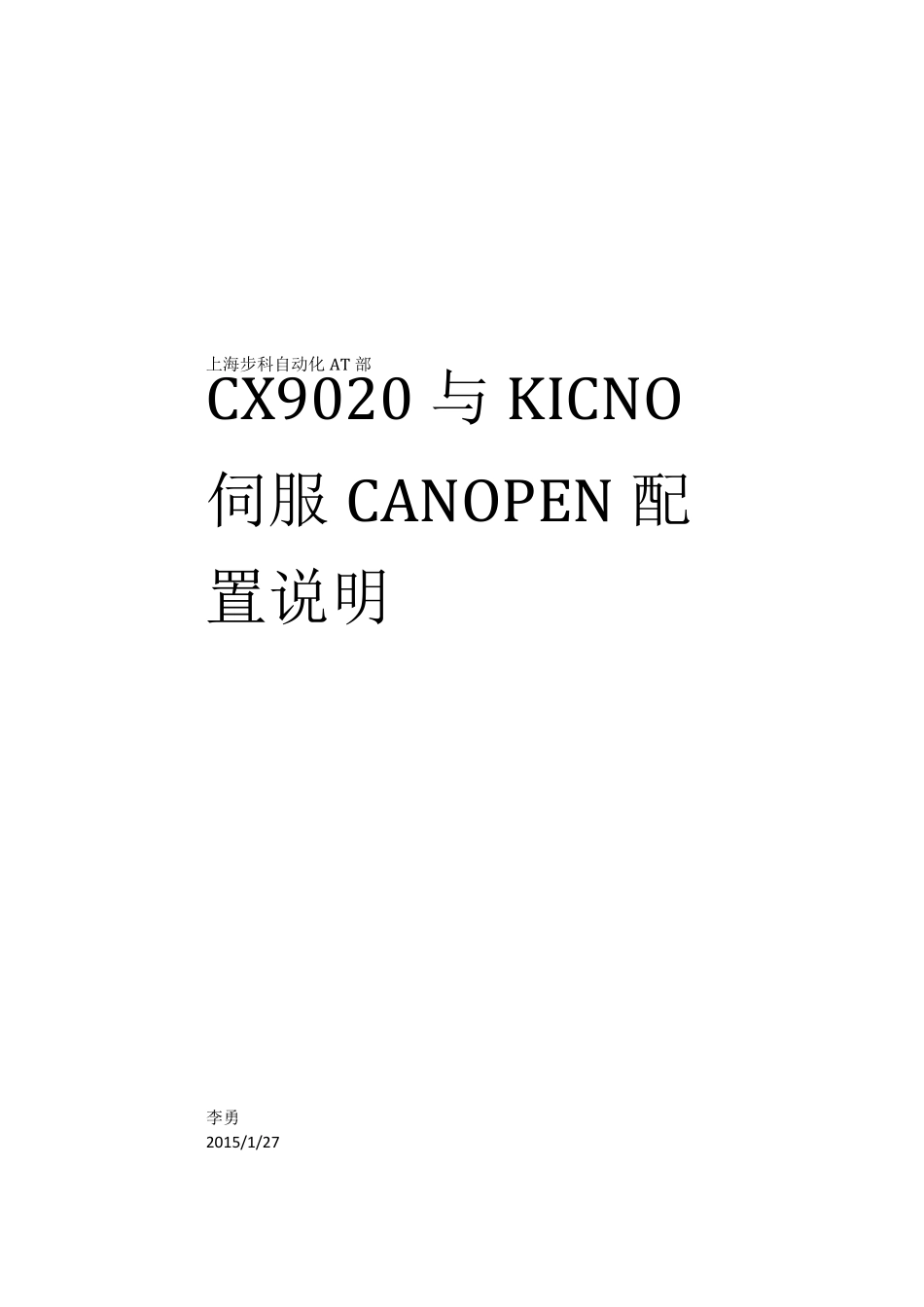
设置PC 的IP,与PLC 的IP 同一网段 2
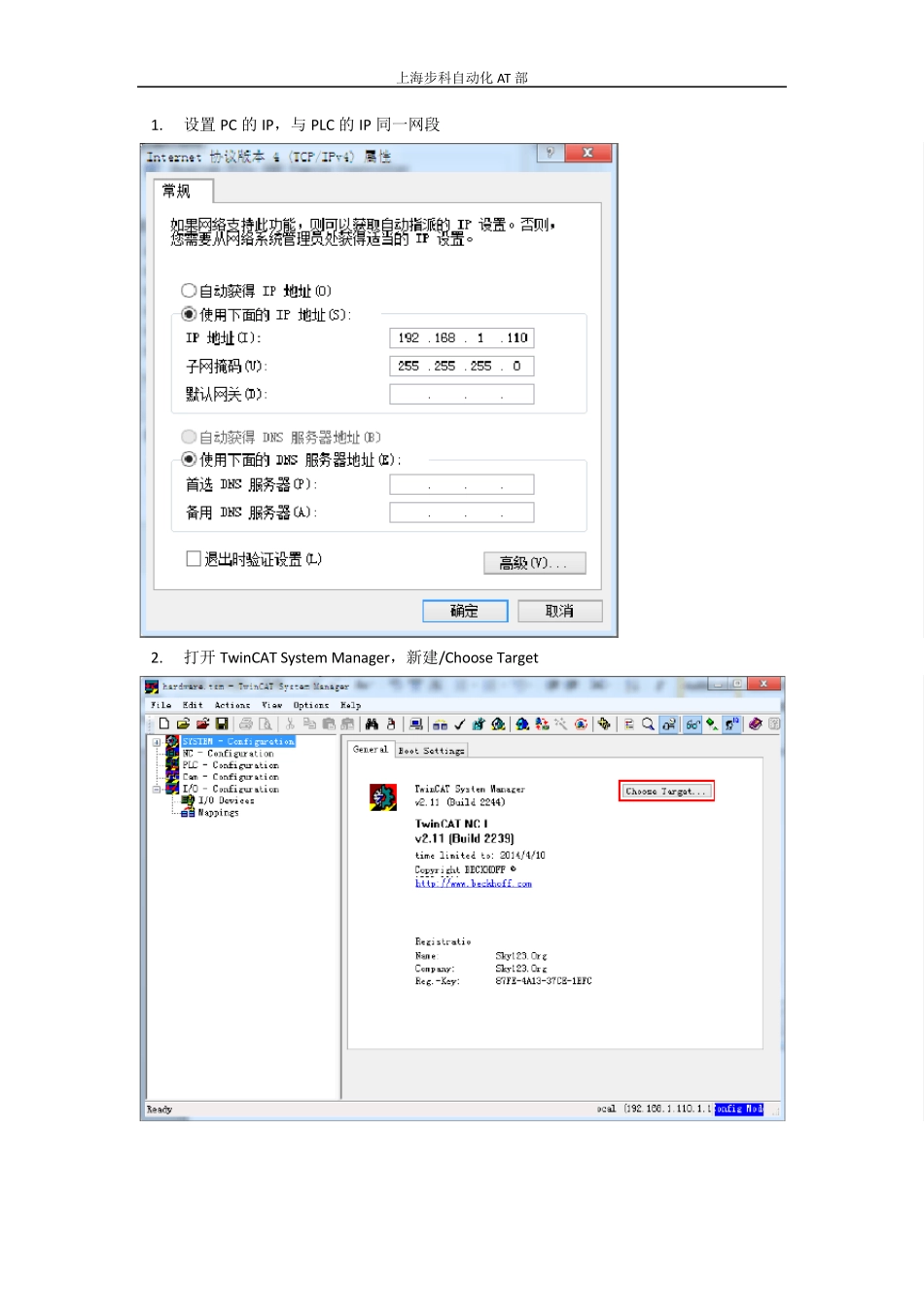
打开 TwinCAT System Manager,新建/Choose Target 上海步科自动化 AT 部 3
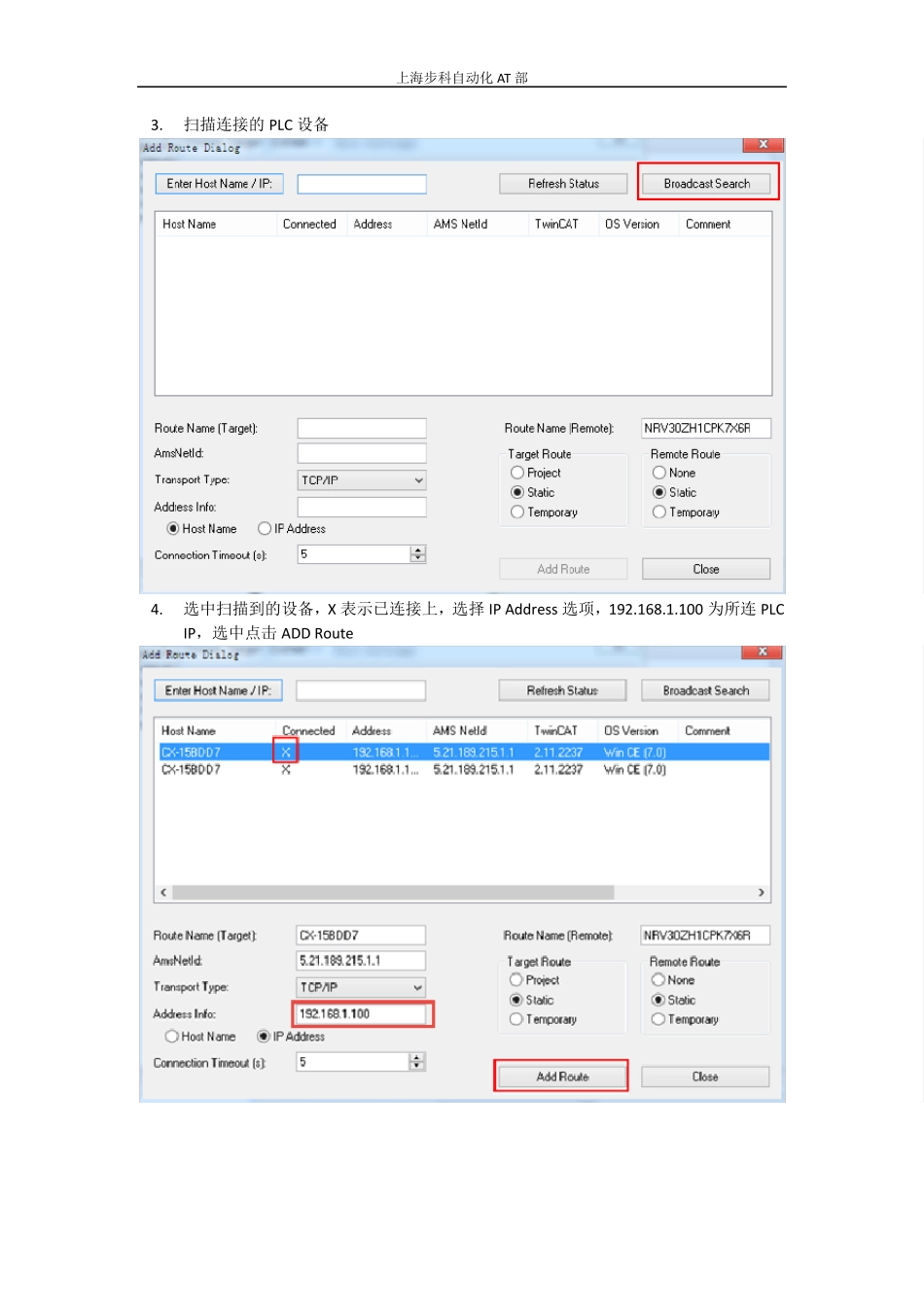
扫描连接的 PLC 设备 4
选中扫描到的设备,X 表示已连接上,选择 IP Address 选项,192
100 为所连 PLC IP,选中点击 ADD Rou te 上海步科自动化 AT 部 上海步科自动化AT 部 5
把PLC 由运行模式变为配置模式 6
扫描PLC 所挂模块 扫描上来后,选择需要加载的模块
上海步科自动化AT 部 7
扫描BOX,设置can 波特率,然后开始扫描
进行这一步的前提是已经配置好各个伺服从站的PDO、波特率、站号
扫描完成 上海步科自动化 AT 部 2 号从站发送 PDO 2 号从站接收 PDO 上海步科自动化 AT 部 8
打开 Tw inCAT PLC Control,新建 PLC 程序,选中所用平台 选择使用的编程语言 9
连上 PLC,Online 选择运行平台 上海步科自动化AT 部 选择当前正在运行的PLC 10
完成后开始编程,定义和控制器物理地址相关的输入输出变量,“%Q*”表示和控制器物理地址相关的可以任意分配地址的输出变量,“%I*”表示和控制器物理地址相关的可以任意分配地址的输入变量
完成编程后下载程序
在TwinCAT System Manager,建立 PLC 运行任务
上海步科自动化 AT 部 调用已建好的 PLC 程序 建立完成可以查看程序中建立的输入输出量 12
将 PLC 输入输出变量同 BOX 中的变量做连接 上海步科自动化 AT 部 完成所有变量连接后