操作案例 下面以倍福公司的Tw inCAT 主站为例,讲述IS620N 伺服驱动器的简单配置使用过程
1, 安装 Tw inCAT 2, 把 IS620N 的EtherCAT 配置文件(IS620N-ECT
XML)拷贝到 Tw inCAT 安装目录:\Tw inCAT\IO\EtherCAT
3, 打开 Tw inCAT
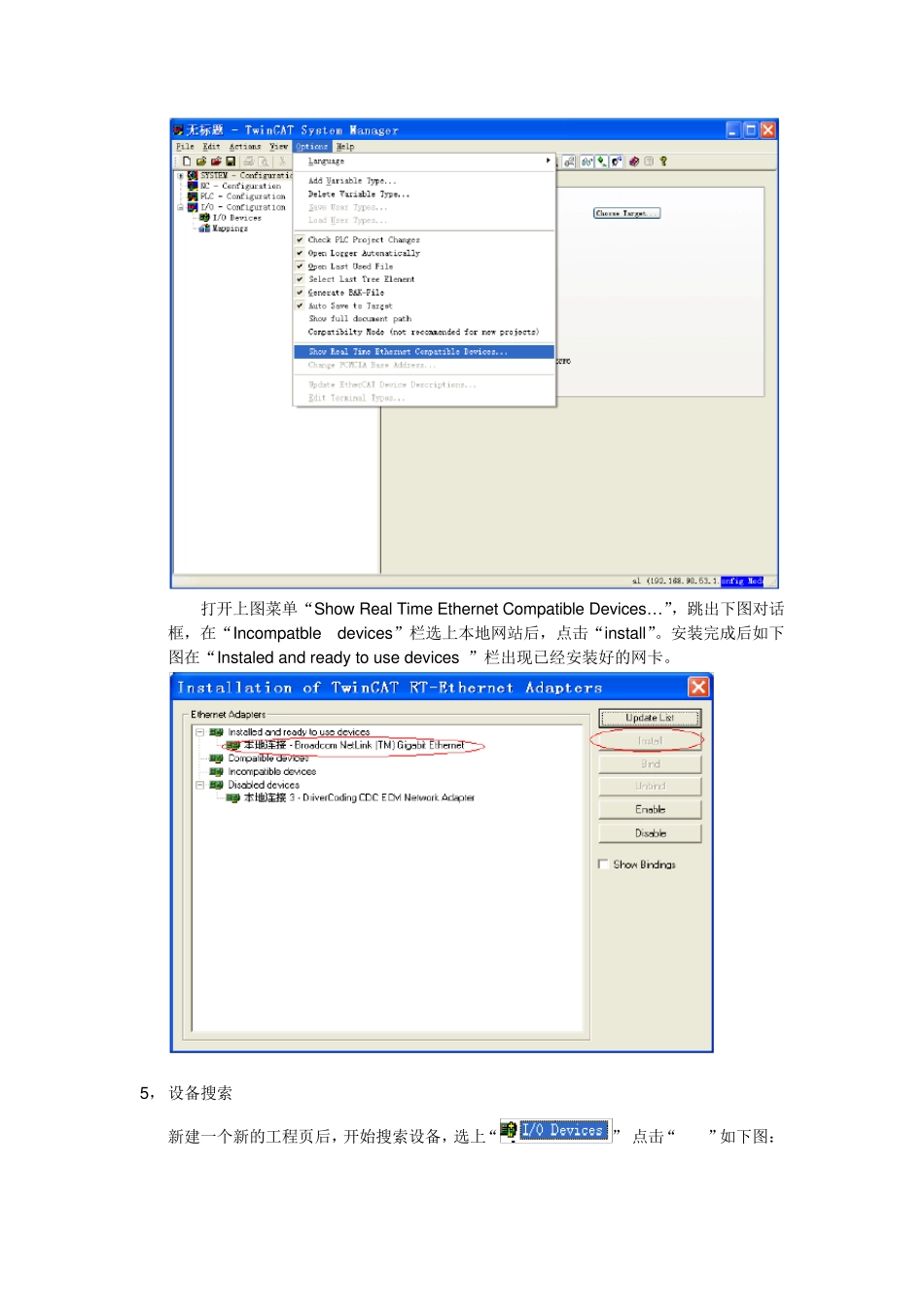
4, 安装 Tw inCAT 网卡驱动 打开上图菜单“Show Real Time Ethernet Compatible Devices…”,跳出下图对话框,在“Incompatble devices”栏选上本地网站后,点击“install”
安装完成后如下图在“Instaled and ready to use devices ”栏出现已经安装好的网卡
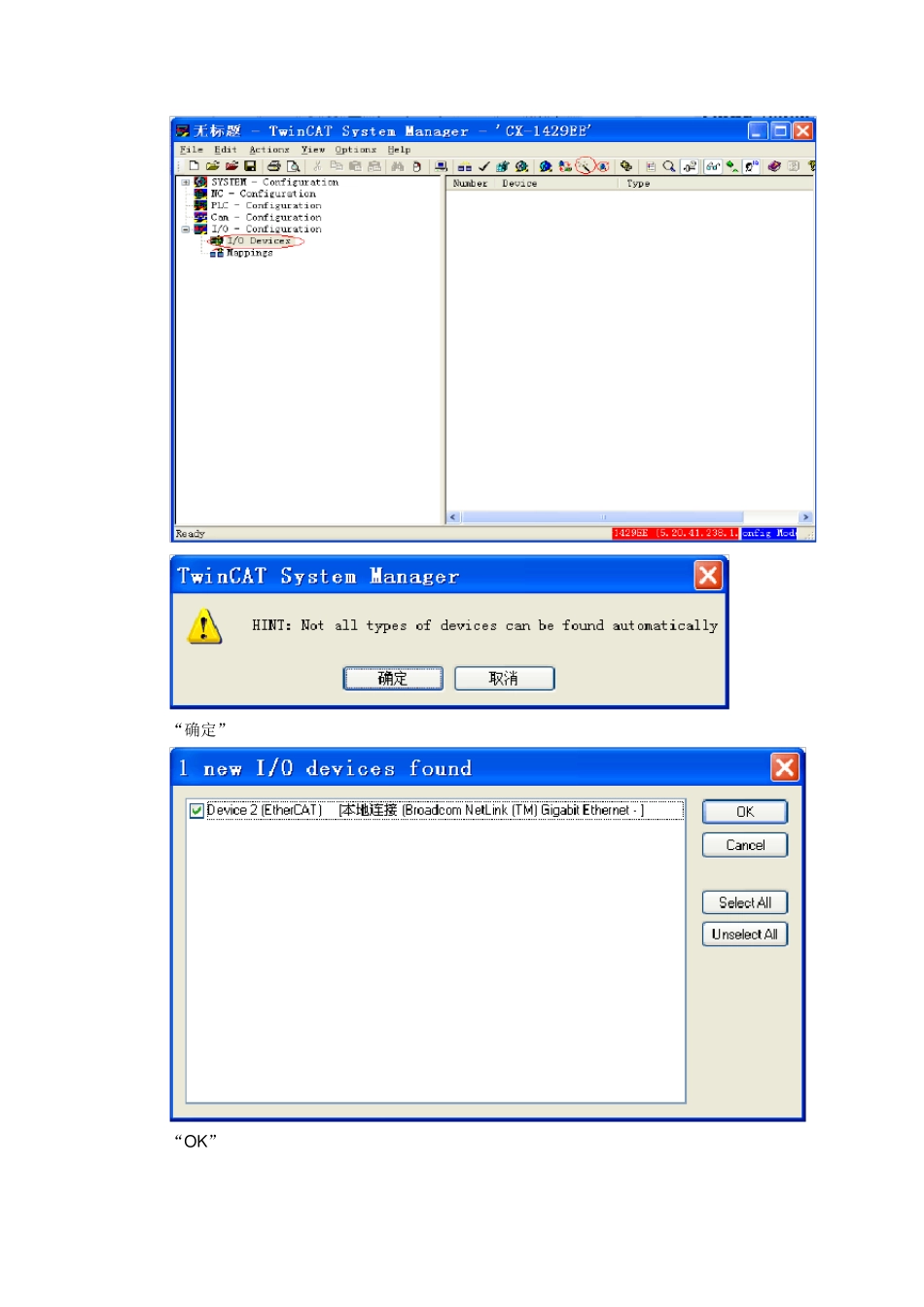
5, 设备搜索 新建一个新的工程页后,开始搜索设备,选上“” 点击“”如下图: “确定” “OK” “是” “否”(如果不需要使用 N C 轴,此步点击“否”) “否”,到这里设备已经搜索完成,如下图: 6, 烧写XML 文件 按上述 1, 2, 3 步骤,点击 3 后显示如下: 依次点击“ESC Access”“E2PROM” “Smart View ”后,点击“Write E2PROM”,出现下述对话框: 点击“ok”后,等待 XML 文件烧录完毕,对话框自动关闭并自动返回下述界面: 点击“确定”,XML 文件烧录成功
7, 配置 PDO 7
1 配置 RPDO: 默认的 RPDO 为 1701,,将其勾选去掉,选择 0x 1600 在 PDO Content 窗口右击,“Delete(删除)”默认的 607A 和 60B8,并“Insert(插入)”60FF 7
2 配置TPDO 默认的TPDO 为1B01,,将其勾选去掉,选择0x 1A00 在PDO Content 窗口右击,“