空 三 加 密 技 术 总 结 一 、概述 空 中三 角测量,即解析空 中三 角测量,是指通过航测内业方法(包括内定向、相对定向、公共连接点的转刺)网构建空 中三 角网并按严密 的数学模型进行区域整体平差,解求出全区所有加 密 点的地面坐标及像片方位元素
目前 Inpho 是主流的航空 摄影测量软件,支持对大飞机数据的空 三 加 密 ,同时有专门的无人机模块对无人机数据进行空 三 加 密 ,对飞行姿态不稳定的无人机数据具有明显优势
二、数据准备 在实际工作中需要以下数据: 1、相机检校是航测处理中必不可少的
一 般航测后处理中需要相机检校后的焦距(mm) 、像元 大小(um)、主点偏移(PPA 或 PPS)等; 2、航片数据
影像一 般以 Tif 或 Tif jepg 格式保存、处理
Jpg 格式在压缩过程中信息损失很大,自动空 三 加 密 时无法匹配出有效的连接点; 3、粗略的外方位数据
航片的粗略外方位元素,大地平面坐标系统,定位精度在 10-20 米以内(俯仰角和偏转角尽量控制在 20 度以下); 4、地面控制点数据
三 、硬件配置情况 联想台式机,四核 3
20GHz,4GB 内存
四、技 术 路线 五 、Inpho 应用实例过程 1、数据预处理 (1)原始航片 数据检查,包括航片框幅、分辨率与相机报告中内容的检查
航片名称与 pos 中的 id 号一一对应
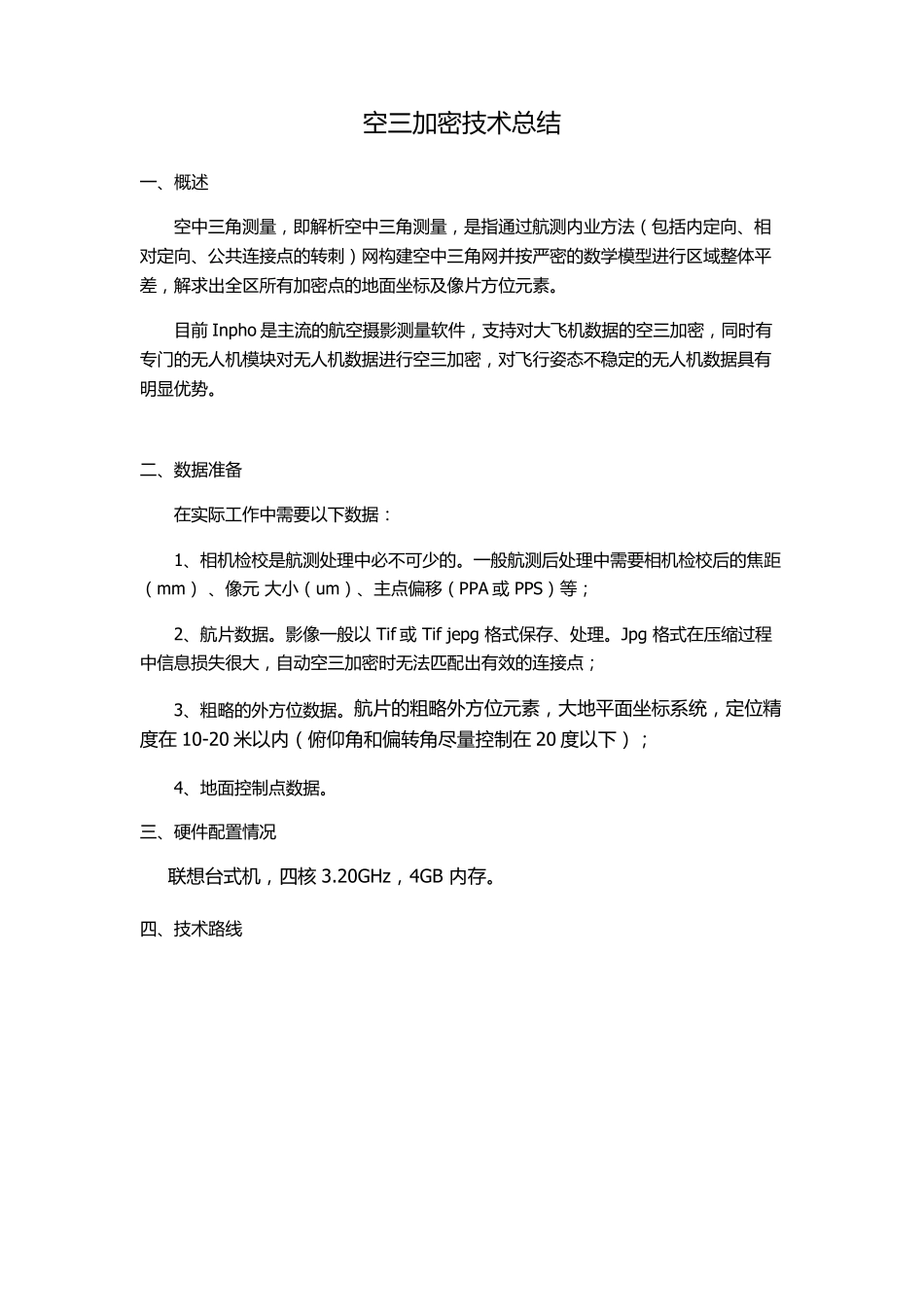
(2)pos 数据整理 坐标为 CGCS2000 高斯克吕格投影坐标
具体包括:id 航片号、x 坐标、y 坐标、h 高程、翻滚角、俯仰角、航飞角;以 txt 文件格式保存;航带间用#间隔
(3)原始航片畸变处理,利用相机文件中的畸变参数应用 Matrax 软件
像主点偏移 x0、y0 对应 Matrax 中的 x0、y0,径向畸变系数为 k1、k2 对应 Matrax 中的 k3、k5,像元大