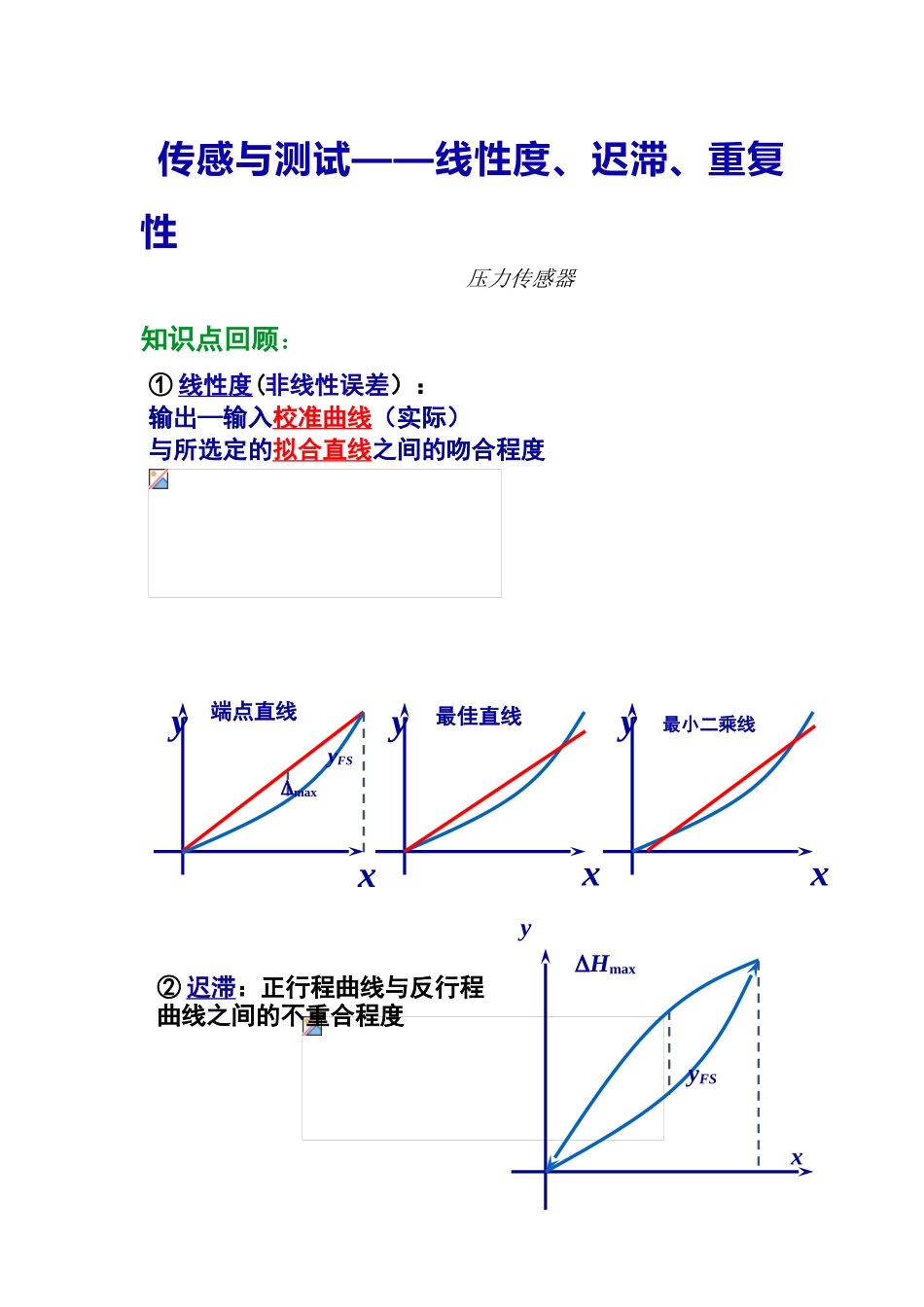
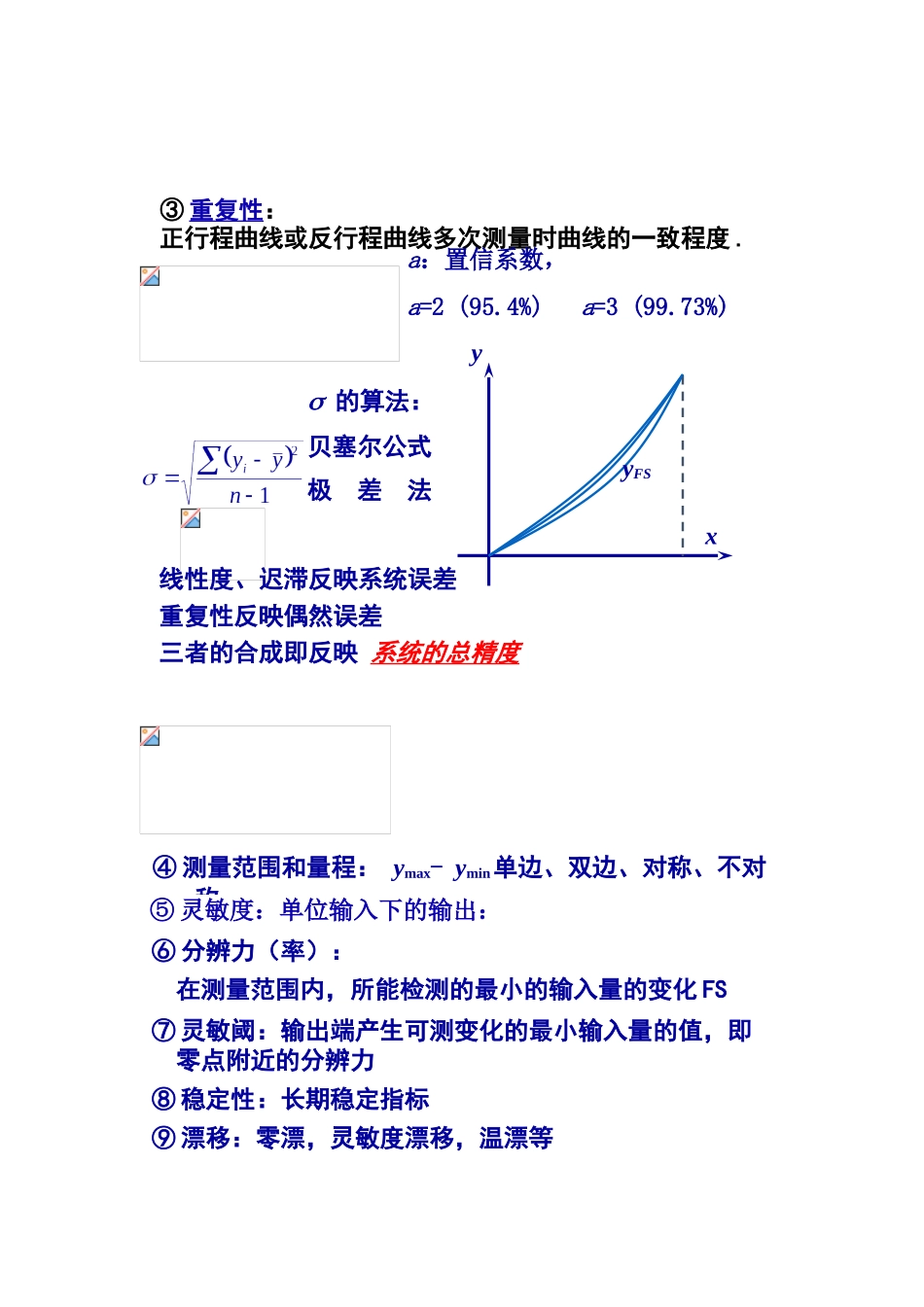
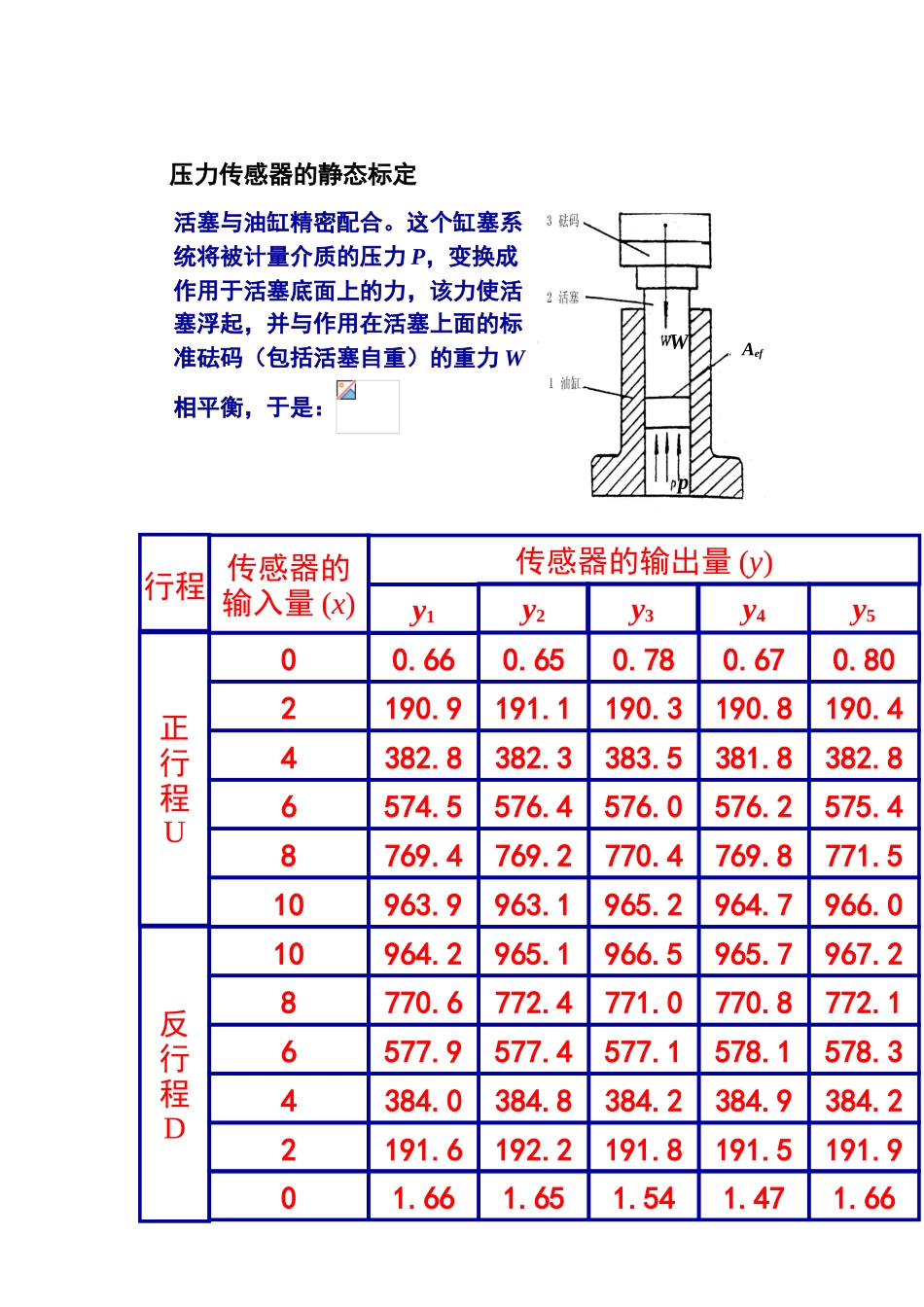
传感与测试——线性度、迟滞、重复性 压力传感器知识点回顾: ① 线性度(非线性误差):输出—输入校准曲线(实际)与所选定的拟合直线之间的吻合程度端点直线最佳直线最小二乘线xyxxyymaxyFS② 迟滞:正行程曲线与反行程曲线之间的不重合程度yxHmaxyFS③ 重复性:正行程曲线或反行程曲线多次测量时曲线的一致程度 .a:置信系数,a=2 (95.4%) a=3 (99.73%)xyyFS 的算法:贝塞尔公式极 差 法线性度、迟滞反映系统误差重复性反映偶然误差三者的合成即反映 系统的总精度 ④ 测量范围和量程: ymax- ymin单边、双边、对称、不对称⑤ 灵敏度:单位输入下的输出:⑥ 分辨力(率):在测量范围内,所能检测的最小的输入量的变化 FS ⑦ 灵敏阈:输出端产生可测变化的最小输入量的值,即零点附近的分辨力⑧ 稳定性:长期稳定指标⑨ 漂移:零漂,灵敏度漂移,温漂等正行程U行程 传感器的输入量 (x)传感器的输出量 (y)y1y2y3y4y500.660.650.780.670.802190.9191.1190.3190.8190.44382.8382.3383.5381.8382.86574.5576.4576.0576.2575.48769.4769.2770.4769.8771.510963.9963.1965.2964.7966.0反行程D10964.2965.1966.5965.7967.28770.6772.4771.0770.8772.16577.9577.4577.1578.1578.34384.0384.8384.2384.9384.22191.6192.2191.8191.5191.901.661.651.541.471.66压力传感器的静态标定活塞与油缸精密配合。这个缸塞系统将被计量介质的压力 P,变换成作用于活塞底面上的力,该力使活塞浮起,并与作用在活塞上面的标准砝码(包括活塞自重)的重力 W 相平衡,于是: AefpWMatlab 程序:%求检测系统线性度,迟滞,重复性m=5;n=5; %m 个测点,n 个来回x1=[2,4,6,8,10]; %正行程的 m 个测点yu=[190.9,382.8,575.8,769.4,963.9; 191.1,383.2,576.1,769.8,964.6; 191.3,383.5,576.6,770.4,965.2; 191.4,383.8,576.9,770.8,965.7; 191.4,383.8,577.0,771.0,966.0]; %正行程测量数据yd=[191.6,384.1,577.3,770.6,964.4; 191.6,384.2,577.4,771.0,965.1; 192.0,384.1,578.1,771.4,965.7; 191.9,384.9,578.1,771.4,965.7; 191.9,384.9,578.5,772.0,966.1] ; %反行程测量数据x2=x1; for i=1:(2*n-1) %扩展到全部的测点 x2=vertcat(x2,x1); i=i+1;end y=[yu;yd]; %所有测量数据组成 n×m 矩阵xmean=mean(x2); %x2 的列方向均值ymean=mean(y); %y 的列方向均值,即每个测点对应的均值xmean=mean(xmean,2)...