主讲:郭玉珍第一页,共十一页
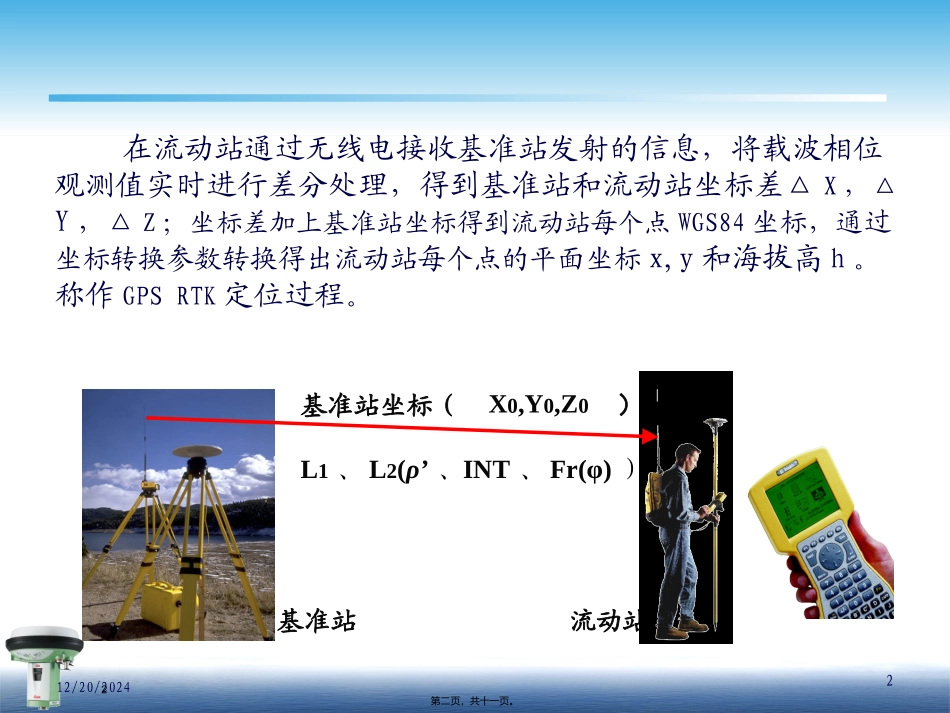
12/20/20242在流动站通过无线电接收基准站发射的信息,将载波相位观测值实时进行差分处理,得到基准站和流动站坐标差△X,△Y,△Z;坐标差加上基准站坐标得到流动站每个点WGS84坐标,通过坐标转换参数转换得出流动站每个点的平面坐标x,y和海拔高h
称作GPSRTK定位过程
基准站流动站基准站坐标(X0,Y0,Z0)L1、L2(ρ’、INT、Fr(φ))2第二页,共十一页
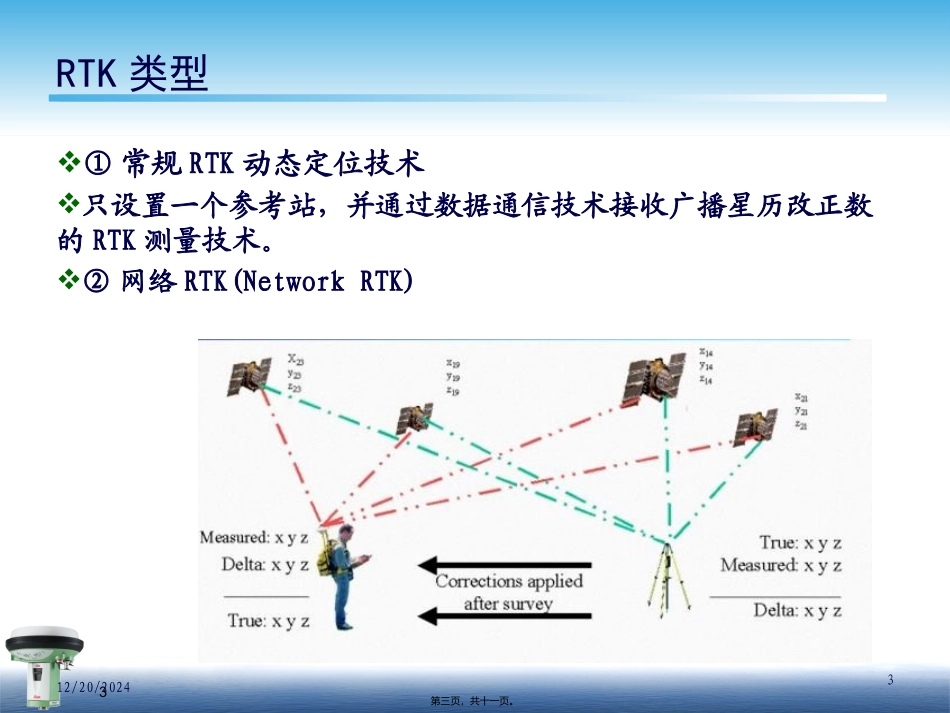
12/20/20243RTK类型①常规RTK动态定位技术只设置一个参考站,并通过数据通信技术接收广播星历改正数的RTK测量技术
②网络RTK(NetworkRTK)3第三页,共十一页
12/20/20244参考站(一个)、数据通讯链和用户基准站数据通讯链流动站(用户)4第四页,共十一页
12/20/20245参考站(ReferenceStation)在一定的观测时间内,一台或几台接收机分别在一个或几个测站上,一直保持跟踪观测卫星,其它接收机在这些测站的一定范围内流动作业,这些固定测站称为参考站,也称基准站
全球定位系统实时动态(RTK)测量技术规范参考站点位选择1
视野开阔,周围无高度超过10度的障碍物;2
周围无信号反射物,以减少多路径干扰;3
地面稳固,易于点的保存;4
远离微波塔、电视发射塔、雷达电视,手机信号发射天线等;大型电磁辐射源200米外,要远离高压输电线路、通讯线路50米外
5第五页,共十一页
12/20/20246数据链RTK系统中参考站和流动站的GPS接收机通过数据链进行通信联系
因此参考站与流动站系统都设有数据链
组成信号调制器信号发射器发射天线6第六页,共十一页
12/20/20247流动站(RovingStation)流动站是在参考站的一定范围内流动作业,并实时提供三维坐标的接收机
全球定位系统实时动态(RTK)测量技术规范7第七页,共十一