1 基础知识 1
1 GPS精密单点定位的基本原理 GPS精密单点定位一般采用单台双频GPS接收机,利用IGS提供的精密星历和卫星钟差,基于载波相位观测值进行的高精度定位
观测值中的电离层延迟误差通过双频信号组合消除,对流层延迟误差通过引入未知参数进行估计
2 时间系统 RTKLIB内部使用GPST(GPST时间)用于GNSS的数据处理和定位算法
数据在RTKLIB内部处理之前,需要转换成GPST时间
使用GPST的原因是避免处理润秒
RTKLIB使用以下结构体表示时间: typedef struct time_t time; /* time(s) expressed by standard time_t */ double sec; /* fraction of second under 1 s */ } gtime_t; 1
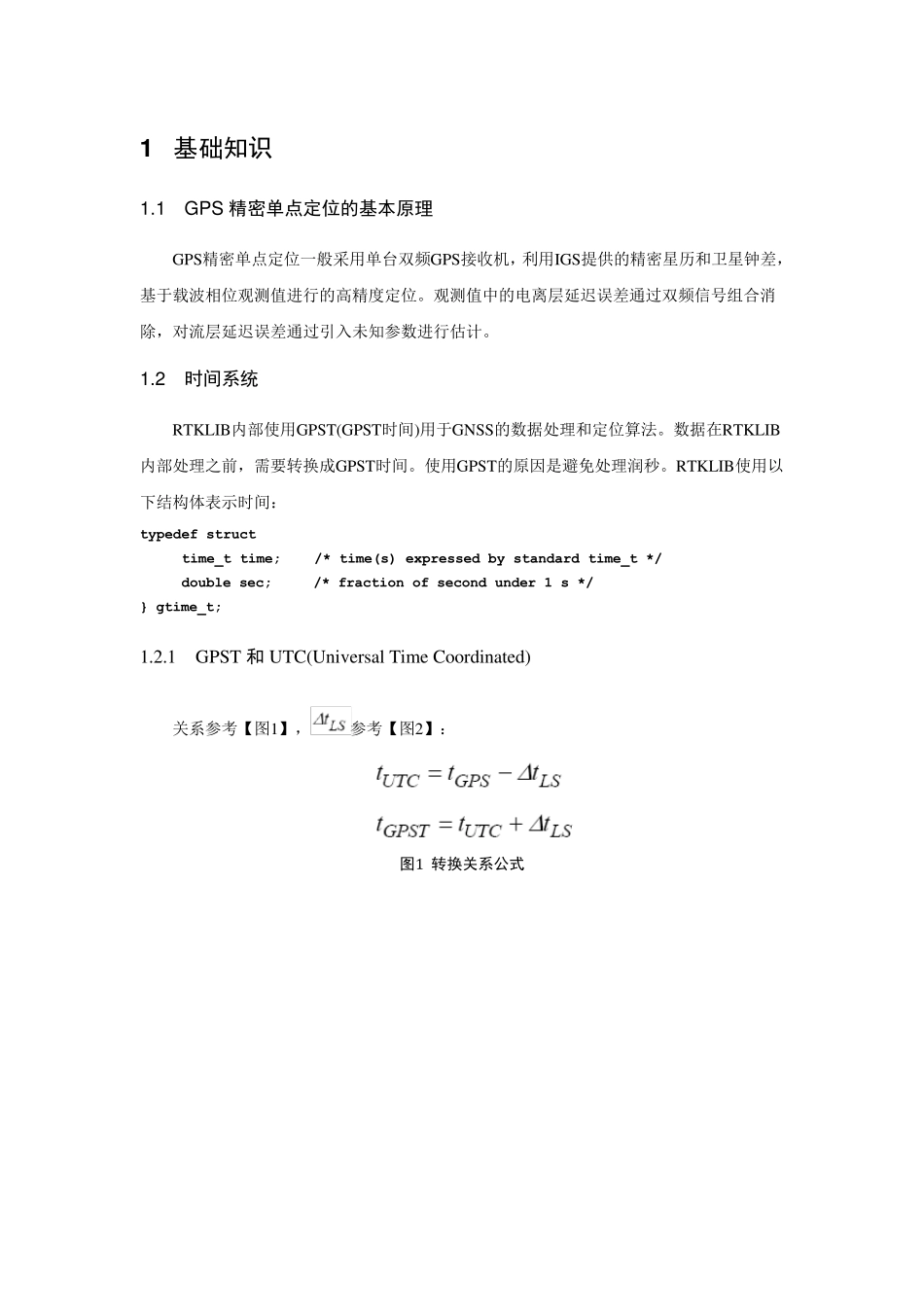
1 GPST 和 UTC(Univ ersal Time Coordinated) 关系参考【图1】,参考【图2】: 图1 转换关系公式 图 2 通过使用GPS导航信息中的UTC参数,GPST到UTC或者UTC到GPST之前的转换可以用更准确的表达方式,如【图3】
图 3 这些参数是由GPS导航消息提供的
2 BDT(北斗导航卫星系统时间) BDT(北斗导航卫星系统时间)是一个连续的时间系统,没有润秒
开始历元的时间是【UTC 2006年1月1号 00:00:00】
北斗时间计算公式【图4】: 图 4 UTC和GPST时间转换同上面的GPS一样,只不过UTC参数来自与北斗导航信息中
3 坐标系统 接收机和卫星的位置在RTKLIB中表示为在ECEF(地心地固坐标系)坐标系统中的X, Y, Z组件
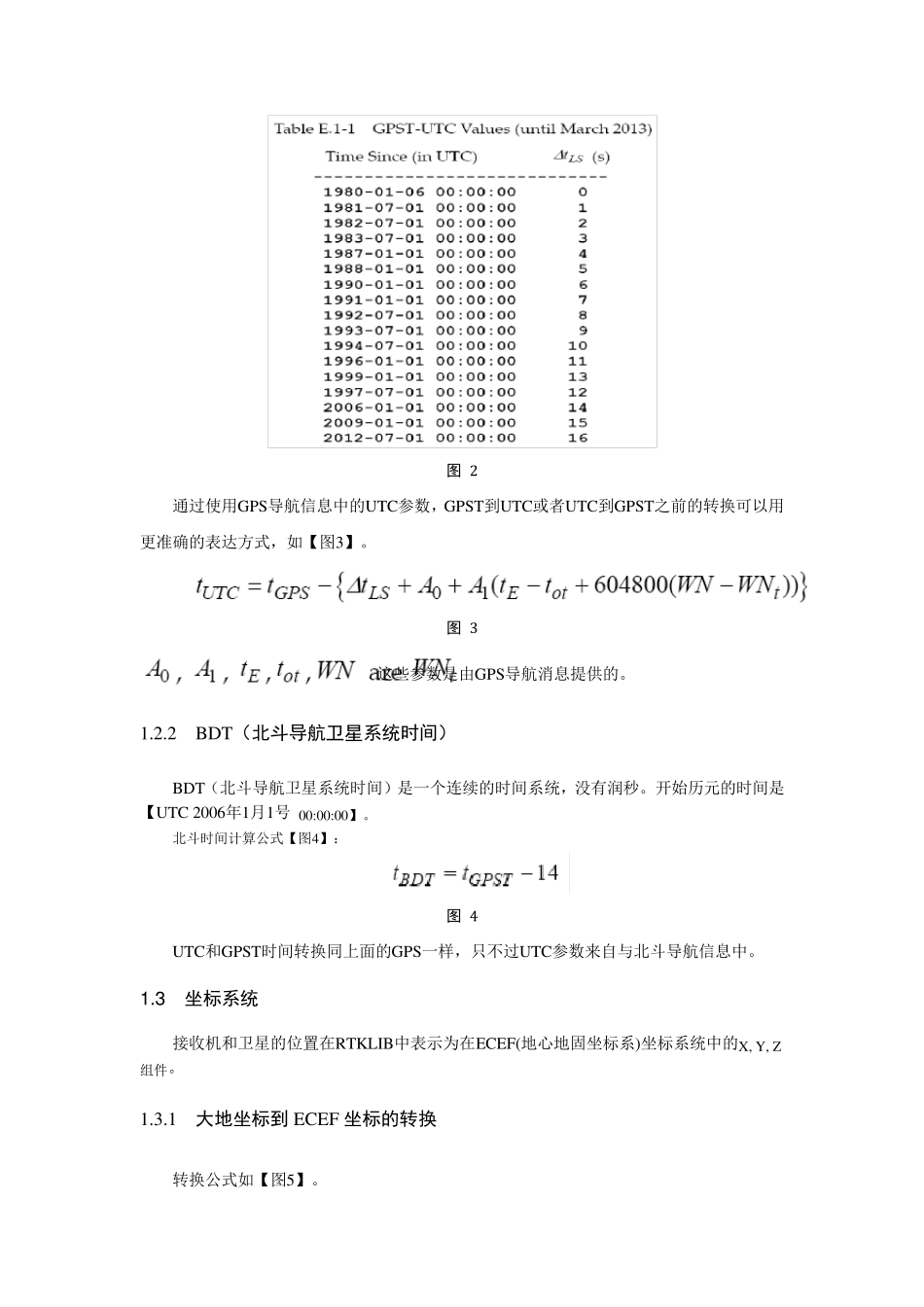
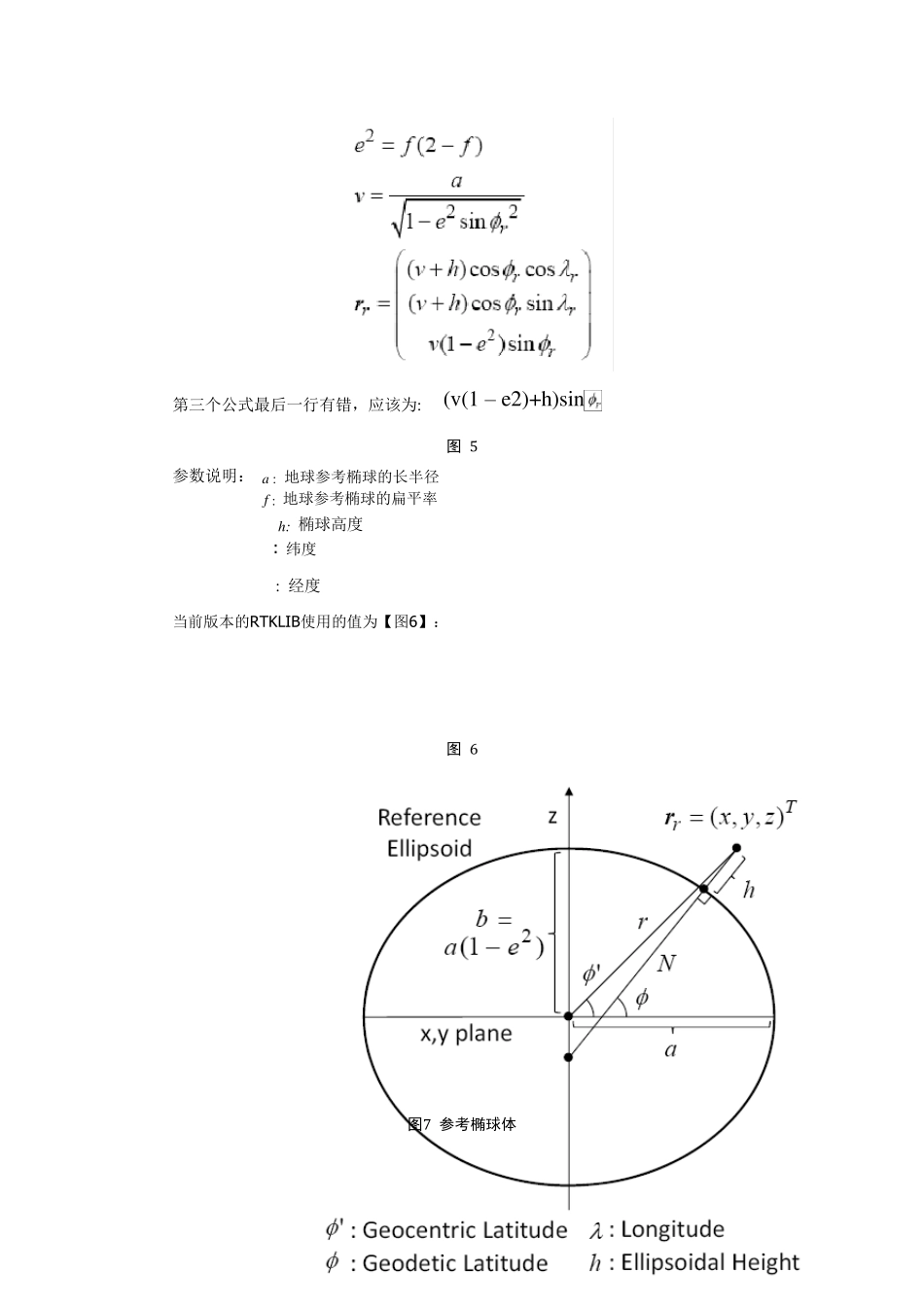
1 大地坐标到 ECEF 坐标的转换 转换公式如【图5】
第三个公式最后一行有错,应该为: (v(1 – e2)