多旋翼无人机的发展历程 结 构 简 单 、维护成本低是多旋翼飞行器的最大优点,飞行控制器使得多旋翼无人机操控简 易和飞行稳定,是多旋翼能够广泛推广的核心原因
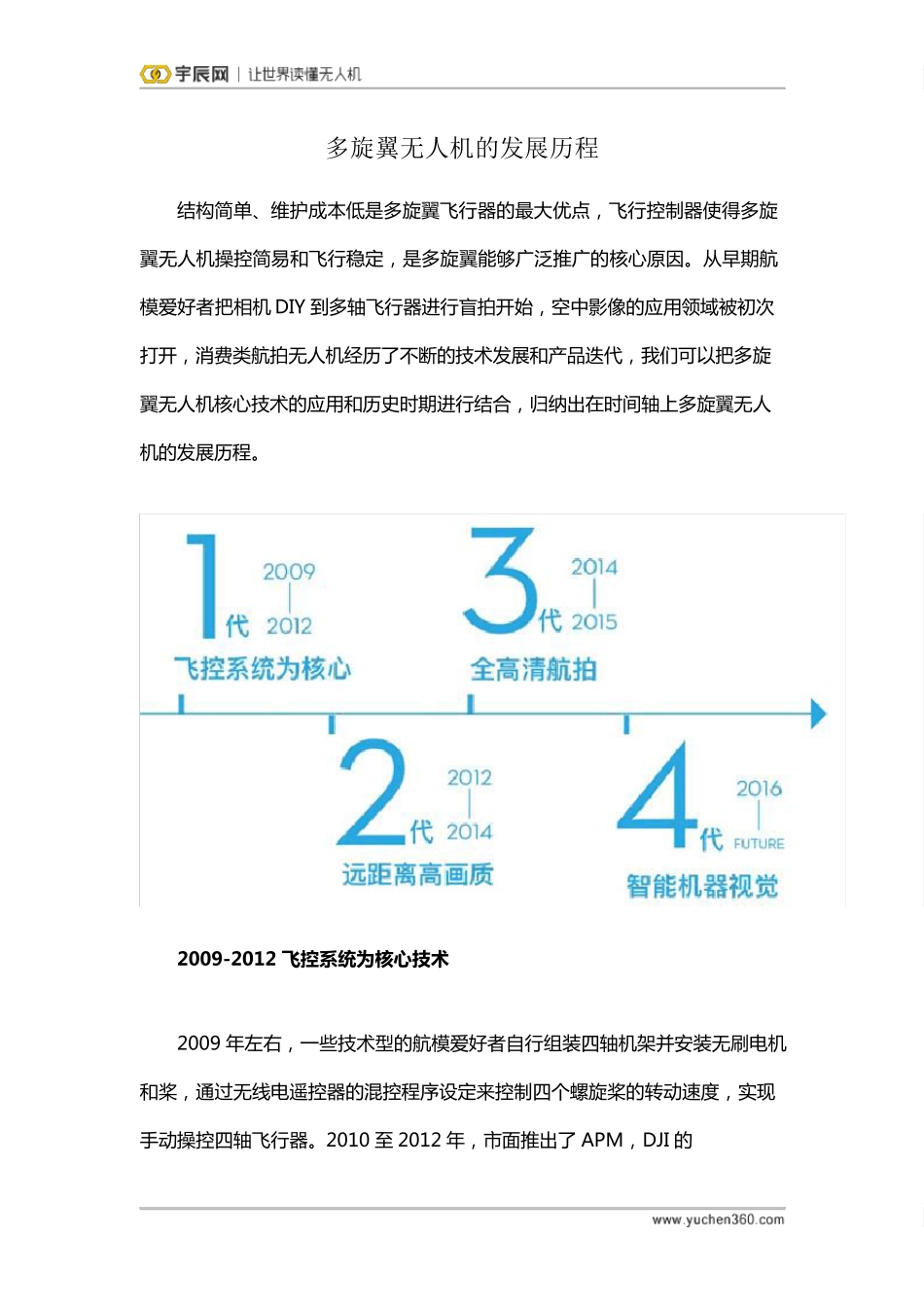
从早期航模爱好者把相机 DIY 到多轴飞行器进行盲拍开始,空中影像的应用领域被初次打开,消费类航拍无人机经历了不断的技术发展和产品迭代,我们可以把多旋翼无人机核心技术的应用和历史时期进行结 合,归纳出在时间轴上多旋翼无人机的发展历程
2009-2012 飞 控 系 统 为核心技术 2009 年左右,一些技术型的航模爱好者自行组装四轴机架并安装无刷电机和桨,通过无线电遥控器的混控程序设定来控制四个螺旋桨的转动速度,实现手动操控四轴飞行器
2010 至 2012 年,市面推出了 APM,DJI 的 Wookong-M、Naza-M,XAricraft 的 AHRS 等多旋翼控制器,实现具备姿态增稳的飞行控制方式,通过 GPS 定位系统实现户外定位悬停和自主返航
多旋翼控制器/图 来源网络 玩家可通过直接挂置小型运动相机和模拟图传,并通过无线电遥控器操控飞机进行最初级的短距离第一人称视角(FPV)飞行和视频录制,因此 2009年至 2012 年是以飞控系统为核心技术的第一代小型多旋翼航拍无人机时期
第 一代小型多旋翼航拍无人机时期/图 来源网络 第 一代小型多旋翼航拍无人机时期/图 来源网络 2012-2014 无 刷 云 台 wifi 图 传 一体机设计 2012 年 , DJI 发 布 的 全 球 首 款 三 轴 无 刷 电 机 直 驱 云 台 禅 思Z15-5N, 利 用姿 态 解 析 和 超 高 精 度 无 刷 电 机 控 制 革 命 性 的 解 决 舵 机 式 云 台 响 应 慢 , 转 动 不 平滑 所 导 致 拍 摄 的 视 频 抖 动 以 及 水 波 纹 问 题 , 开 启 了 多 轴 无 人 机 真