红外遥控器的原理 一
关于遥控器 遥控器其核心元器件就是编码芯片,将需要实现的操作指令例如选台、快进等事先编码,设备接收后解码再控制有关部件执行相应的动作
显然,接收电路及CPU 也是与遥控器的编码一起配套设计的
编码是通过载波输出的,即所有的脉冲信号均调制在载波上,载波频率通常为 38K
载波是电信号去驱动红外发光二极管,将电信号变成光信号发射出去,这就是红外光,波长范围在 840nm 到 960nm 之间
在接收端,需要反过来通过光电二极管将红外线光信号转成电信号,经放大、整形、解调等步骤,最后还原成原来的脉冲编码信号,完成遥控指令的传递,这是一个十分复杂的过程
红外线发射管通常的发射角度为 30-45 度之间,角度大距离就短,反之亦然
遥控器在光轴上的遥控距离可以大于8
5 米,与光轴成 30 度(水平方向)或 15 度(垂直方向)上大于6
5 米,在一些具体的应用中会充分考虑应用目标,在距离角度之间需要找到某种平衡
对于遥控器涉及到如下几个主要问题: 1
遥控器发出的编码信号驱动红外线发射管,必须发出波长范围在 940nm 左右的的红外光线,因为红外线接收器的接收二极管主要对这部分红外光信号敏感,如果波长范围不在此列,显然无法达到控制之目的
不过,几乎所有的红外家电遥控器都遵循这一标准
正因为有这一物理基础,多合一遥控器才有可能做成
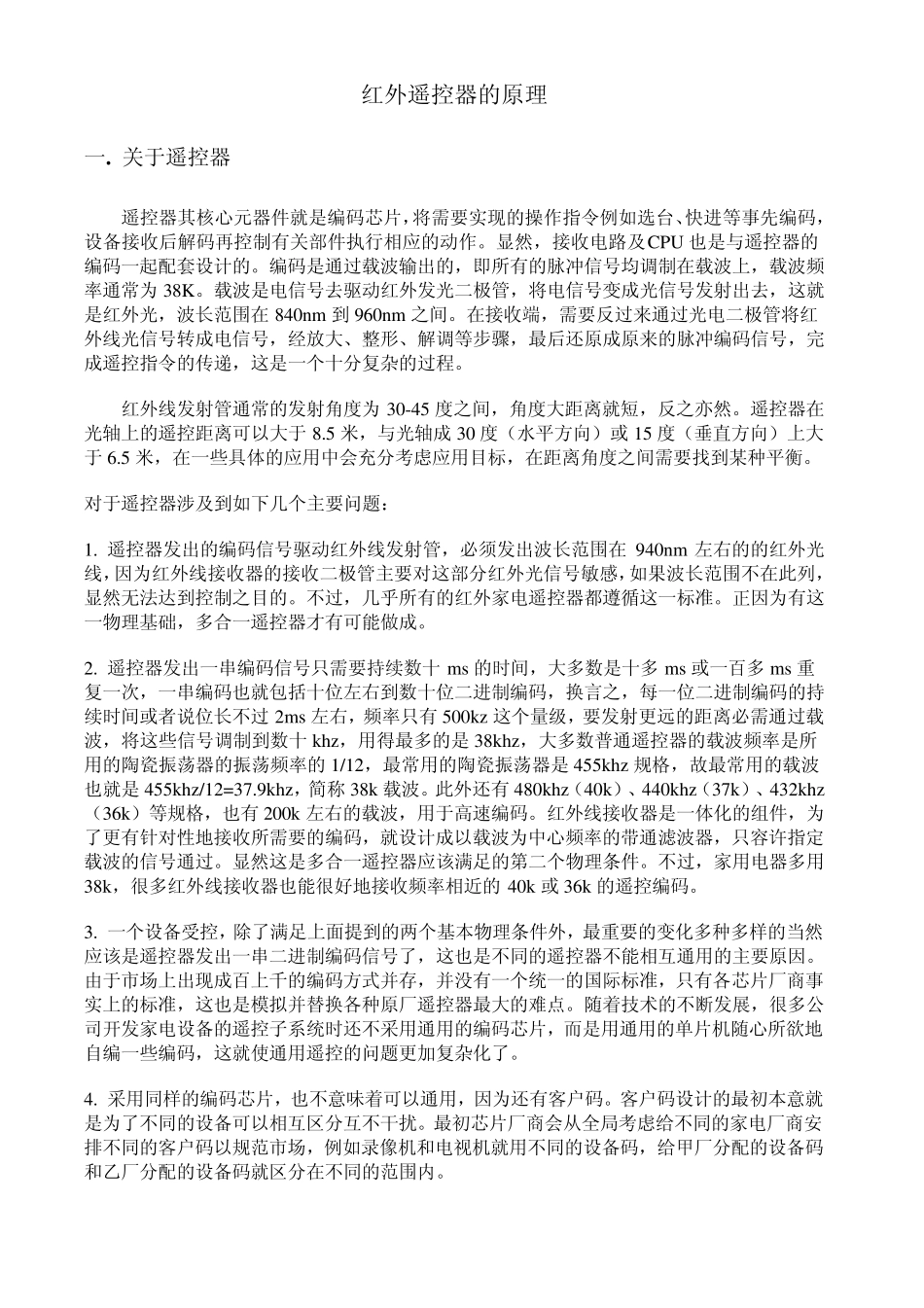
遥控器发出一串编码信号只需要持续数十 ms 的时间,大多数是十多 ms 或一百多 ms 重复一次,一串编码也就包括十位左右到数十位二进制编码,换言之,每一位二进制编码的持续时间或者说位长不过 2ms 左右,频率只有 500kz 这个量级,要发射更远的距离必需通过载波,将这些信号调制到数十 khz,用得最多的是38khz,大多数普通遥控器的载波频率是所用的陶瓷振荡器的振荡频率的1/12,最常用的陶瓷振荡器是455khz 规