自动控制原理实验报告 实验题目:线性系统的根轨迹 班级: 学号: 姓名: 指导老师: 实验时间: 一、实验目的 1
熟悉MATLAB 用于控制系统中的一些基本编程语句和格式
利用MATLAB 语句绘制系统的根轨迹
掌握用根轨迹分析系统性能的图解方法
掌握系统参数变化对特征根位置的影响
二、实验内容 同时得出在单位阶跃负反馈下使得闭环系统稳定的K 值的范围
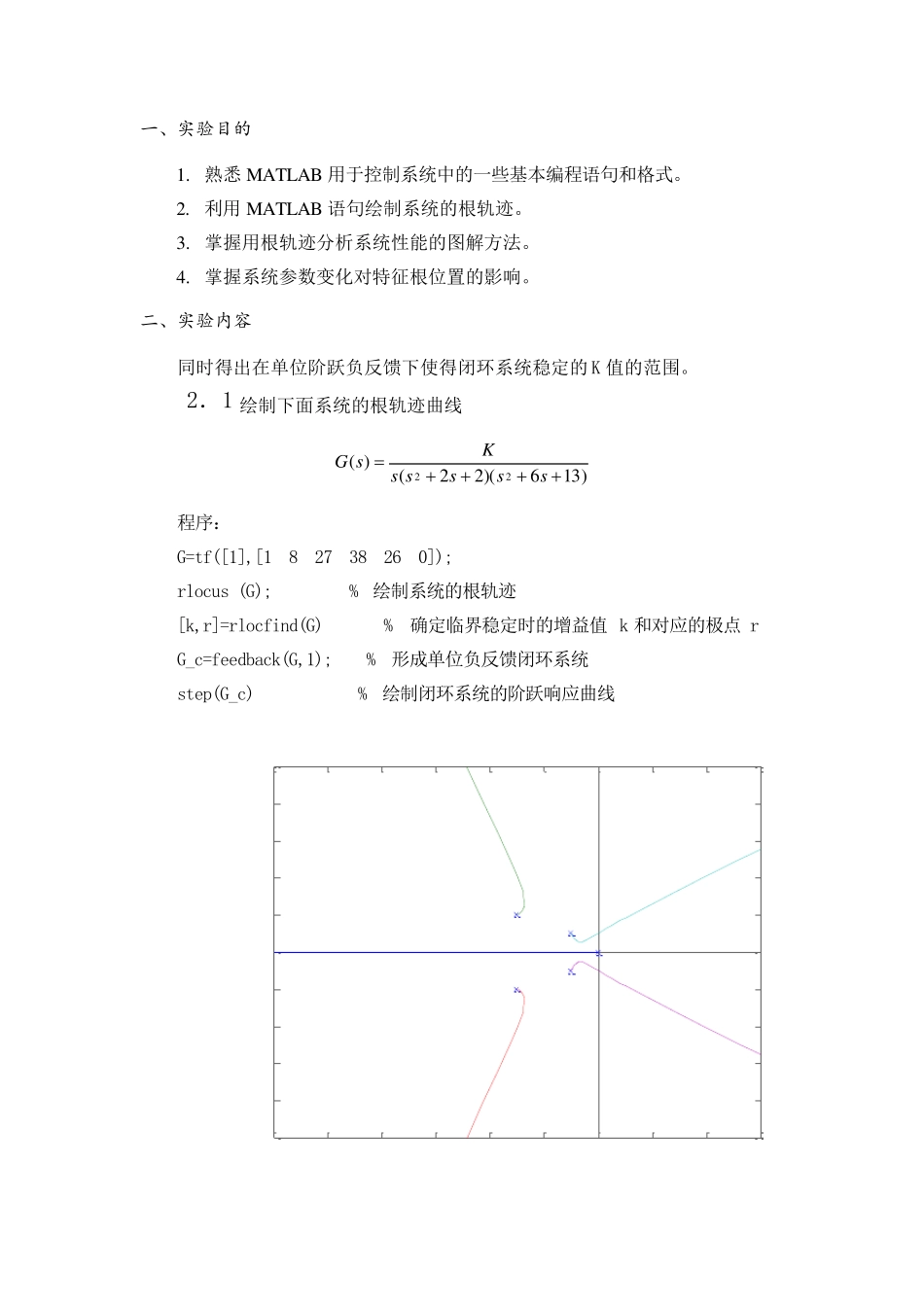
2.1 绘制下面系统的根轨迹曲线 )136)(22()(22sssssKsG 程序: G=tf([1],[1 8 27 38 26 0]); rlocus (G); % 绘制系统的根轨迹 [k,r]=rlocfind(G) %确定临界稳定时的增益值 k 和对应的极点 r G_c=feedback(G,1); %形成单位负反馈闭环系统 step(G_c) % 绘制闭环系统的阶跃响应曲线 -12-10-8-6-4-20246-10-8-6-4-20246810Root LocusReal AxisImaginary Axis 02040608010012014000
91Step ResponseTime (sec)Amplitude 得出在单位阶跃负反馈下使得闭环系统稳定的 K 值的范围:K>28
7425 2.2 绘制下面系统的根轨迹曲线 )10)(10012)(1()12()(2sssssKsG 程序: G=tf([1 12],[1 23 242 1220 1000]); rlocus (G); %绘制系统的根轨迹 [k,r]=rlocfind(G) %确定临界稳定时的增益值k 和对应的极点 r G_c=feedback(G,1); %形成单位负反馈闭环系统 step(G_c) %绘制闭环系统的阶跃响应曲线 -60-50-