《机器人学导论》课程教学大纲课程名称:机器人学导论课程编号:BF (英文):Introduction to Robotics 学时36 学分2 课程性质选修先修课程 :线性代数、机构学、自动控制适用专业: 机械电子、机械工程及自动化开课系(所): 机械与动力工程学院机器人研究所教材和教学参考书:1.1.教材:机器人学、蔡自兴、清华大学出版社、20002.教学参考书 : 机器人学导论,约翰J
克雷格、西北工业大学出版社、1987 注:上述教材和参考书将根据教材课购买情况可互换一、一、本课程的性质、地位、作用和任务面对 21 世纪知识经济时代的机遇与挑战,人类(地球人)正在以非凡的智慧构思新世纪的蓝图
世界的明天将更加美好
但是,地球人在发展中也面临着环境、人口、资源、战争和贫困等普遍问题,同时还要学会与机器人共处,这是21 世纪地球人必须正视和处理的紧要问题,是影响地球人生存和发展的休戚与共的重大事件
机器人学是一门高度交叉的前沿学科,机器人技术是集力学、 机械学、 生物学、人类学、计算机科学与工程、 控制论与控制工程学、 电子工程学、 人工智能、社会学等多学科知识之大成, 是一项综合性很强的新技术
自第一台电子编程工业机器人问世以来,机器人学已取得令人瞩目的成就
正如宋健教授1999 年 7月 5 日在国际自动控制联合会第14 届大会报告中所指出的: “机器人学的进步和应用是本世纪自动控制最有说服力的成就,是当代最高意义上的自动化
” 机器人技术的出现与发展, 不但使传统的工业生产面貌发生根本性的变化,而且将对人类的社会生活产生深远的影响
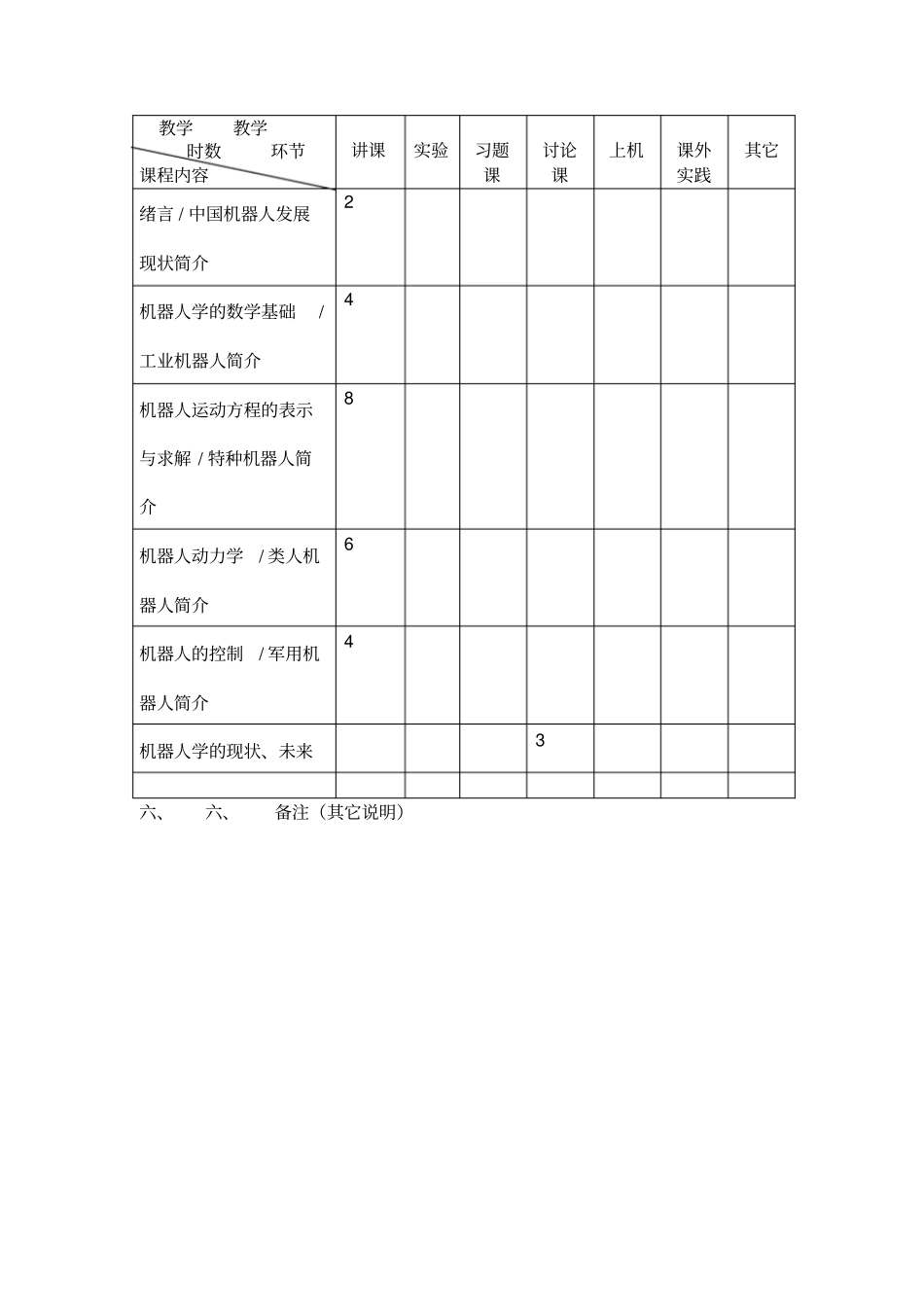
二、二、本课程的教学内容和基本要求1.1.绪言简述机器人学的起源与发展, 讨论机器人学的定义, 分析机器人的特点、 结构与分类
2.2.机器人学的数学基础空间任意点的位置和姿态变换、坐标变换、 齐次坐标变换、 物体的变换和逆变换,