第 1 页 共 9 页 履带吊行走时对地面坡度的相关要求 1、CC1400 履带吊 1
1 空载行走对地面坡度的要求 1
1 主臂工况(详见说明书第六章6
3/P15 )和主臂超起工况(详见说明书第六章6
2/P45) 请根据下表要求进行控制(包含所有配重组合方式): 主臂长度HA(m) 副臂长度HI(m) 最大允许爬坡角度 STW(°) 最大允许爬坡比 STP(%) 18 —— 16
0 24 —— 16
0 30 —— 14
0 36 —— 14
0 42 —— 11
0 48 —— 11
0 54 —— 11
0 60 —— 8
0 66 —— 8
0 72 —— 8
2 轻重混合工况(见说明书第六章6
3/P21 )和轻重混合超起工况(见说明书第六章6
2/P49 ) 请根据下表要求进行控制(包含所有配重组合方式): 主臂长度HA(m) 副臂长度HI(m) 最大允许爬坡角度 STW(°) 最大允许爬坡比 STP(%) 54 —— 8
0 60 —— 8
0 68 —— 8
0 72 —— 8
0 78 —— 8
0 84 —— 8
0 90 —— 8
0 96 —— 8
0 102 —— 8
0 108 —— 8
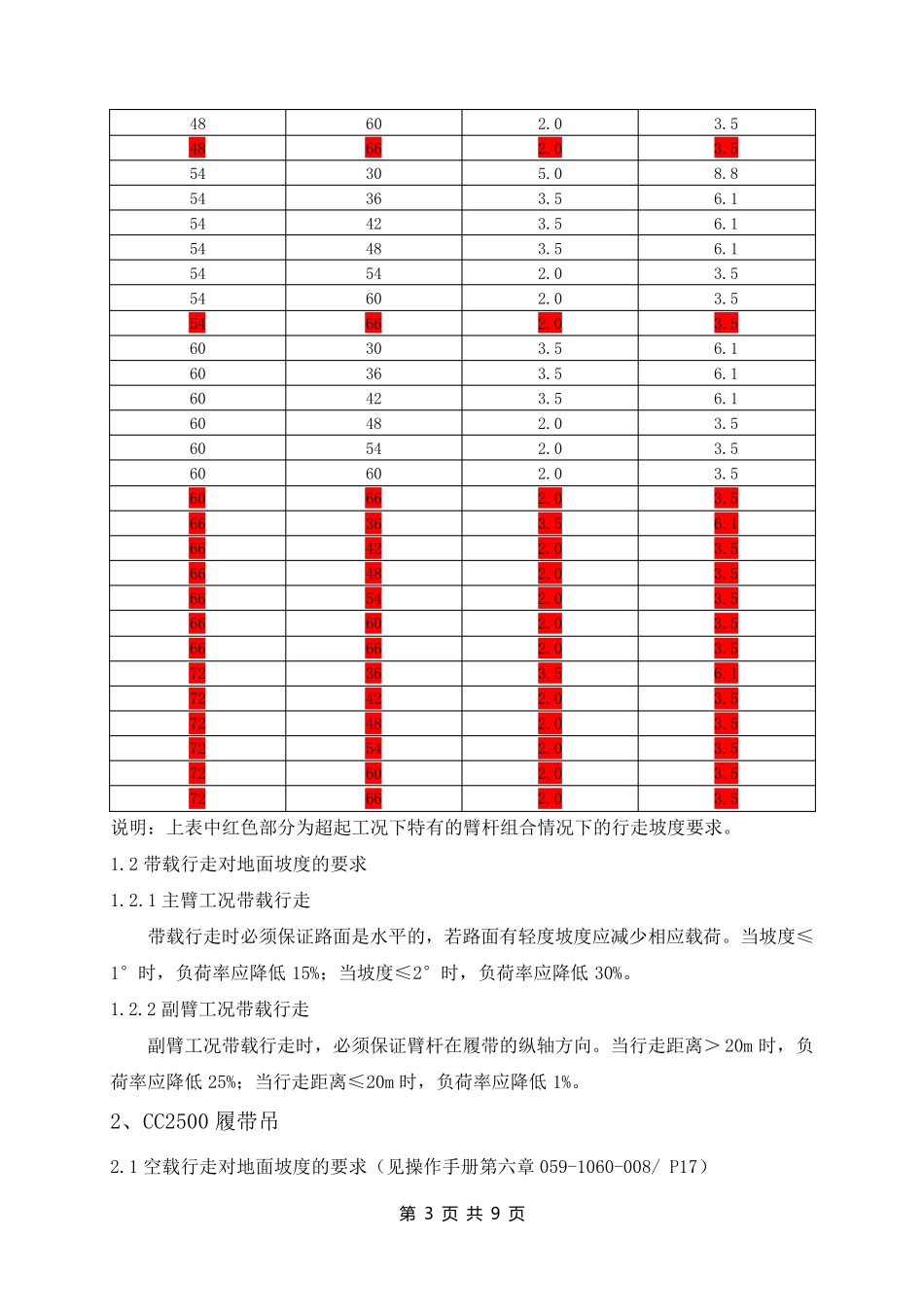
0 说明:上表中红色部分为超起工况下特有的臂杆组合情况下的行走坡度要求
3 塔式工况(见说明书第六章6
3/P33)和塔式超起工况(见说明书第六章6
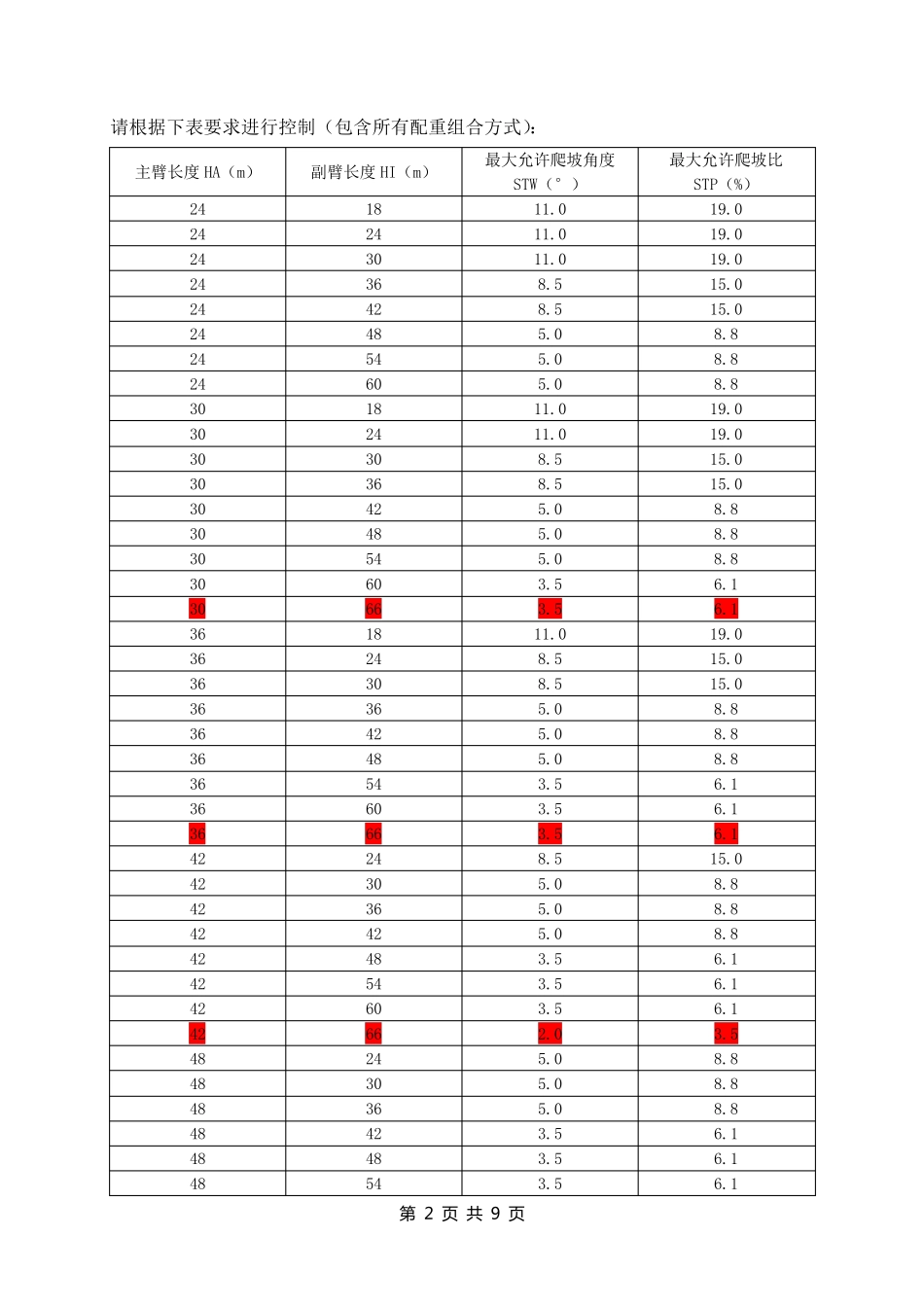
1/P53) 第 2 页 共 9 页 请根据下表要求进行控制(包含所有配重组合方式): 主臂长度HA