FANUC 机器人与西门子S7-1200 Profinet通讯 1 FANUC 机器人与S7-1200 PLC Profinet 通讯方法 一、PLC 组态 1
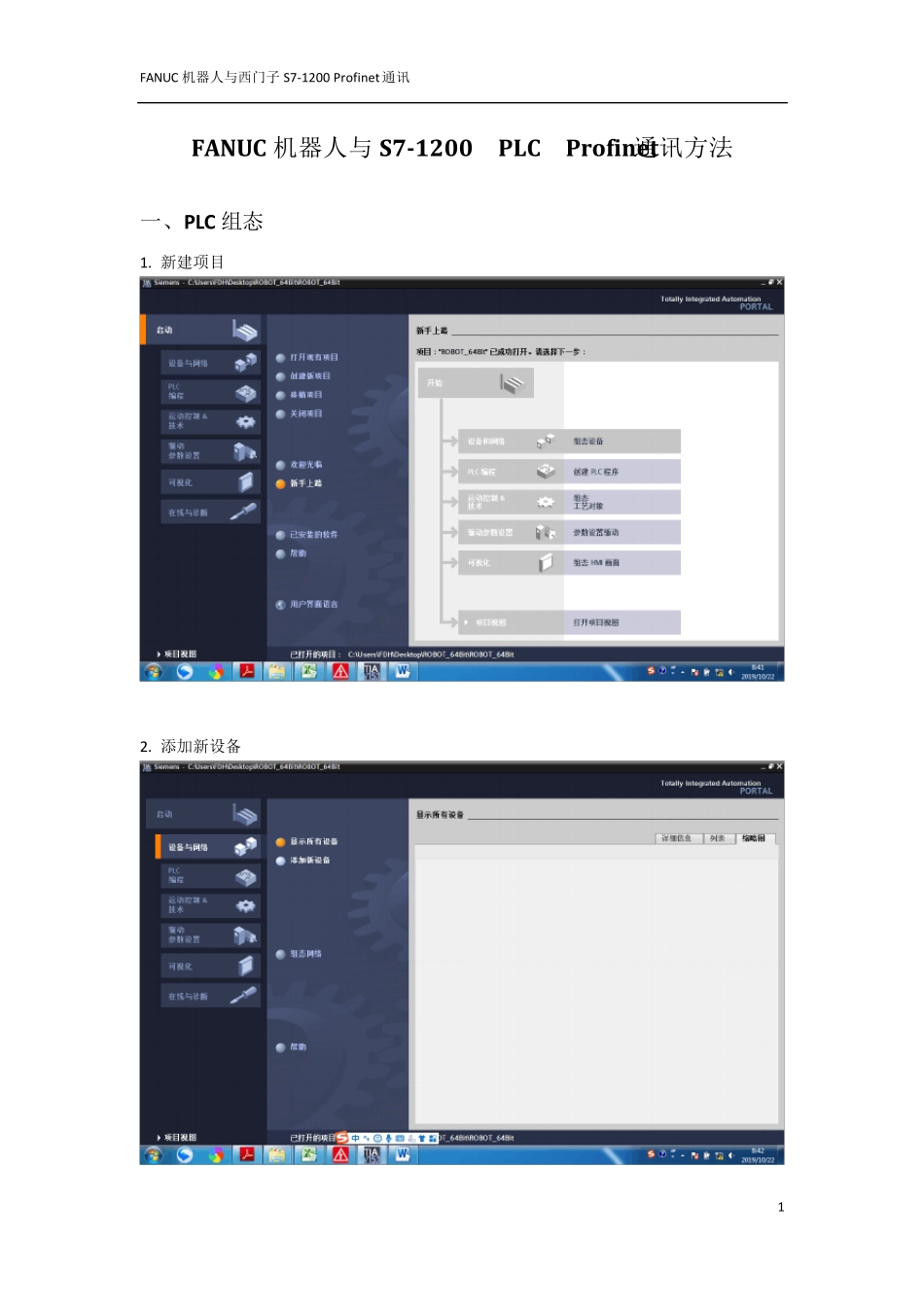
新建项目 2
添加新设备 FANUC 机器人与西门子S7-1200 Profinet通讯 2 3
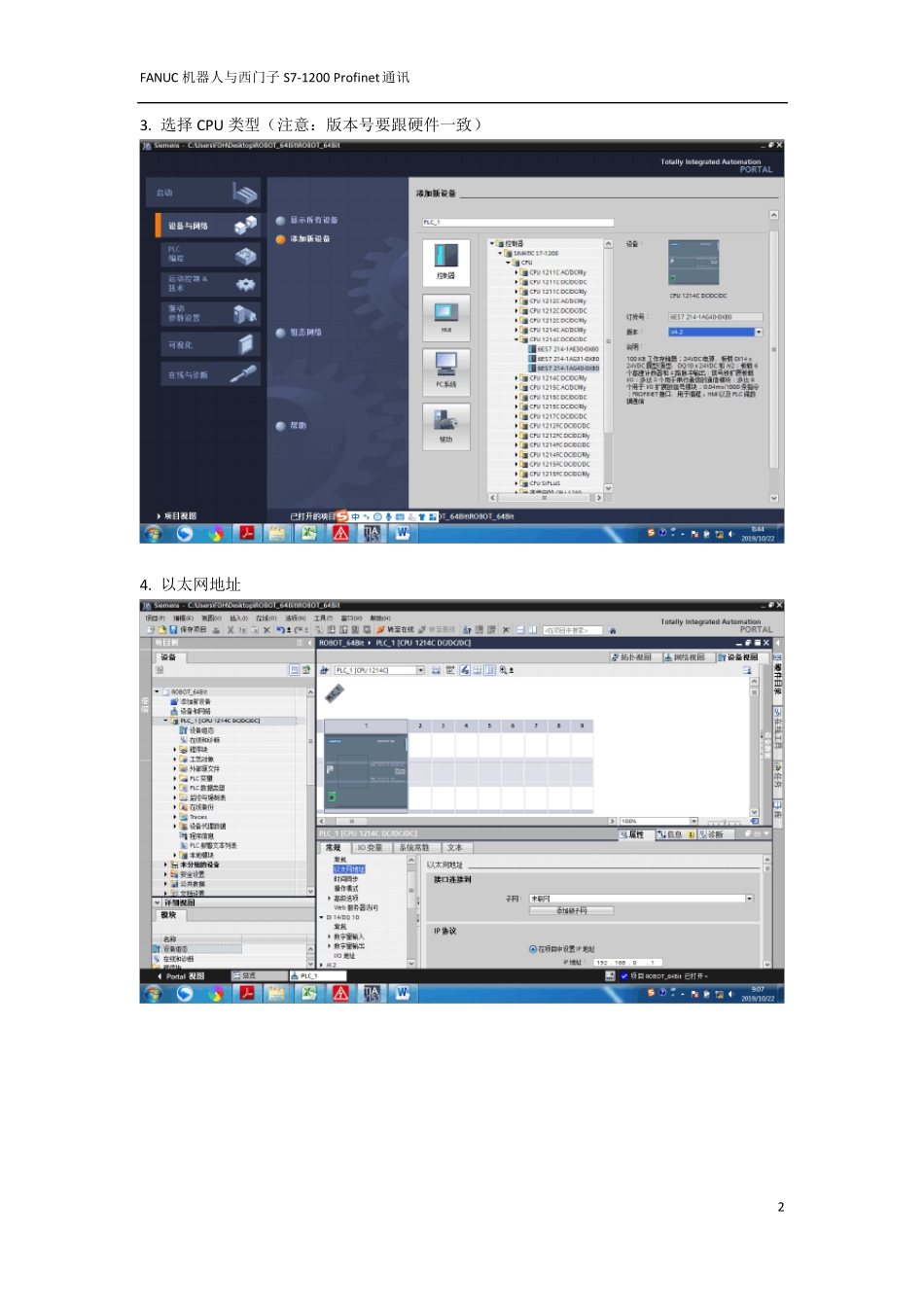
选择CPU 类型(注意:版本号要跟硬件一致) 4
以太网地址 FANUC 机器人与西门子S7-1200 Profinet通讯 3 5
添加新子网 6
IP 协议(注意PLC 的IP 地址要跟机器人的IP 地址在同一个网段) FANUC 机器人与西门子S7-1200 Profinet通讯 4 7
设备和网络 8
添加机器人(需要先安装好FANUC 机器人GSD 文件) 9
选择 硬件目录下 → 其他现场设备 → PROFINET IO → I/O → FANUC →R-30Ib EF2 →AO5B-2600-R843;FANUC Robot Controller(1
0) FANUC 机器人与西门子 S7-1200 Profinet通讯 5 10
组网 FANUC 机器人与西门子 S7-1200 Profinet通讯 6 11
点击未分配 FANUC 机器人与西门子S7-1200 Profinet通讯 7 12
进入设备视图 13
双击r30ib-iodevice(机器人图标)设置机器人IP 地址(注意要更机器人中的IP 地址一致) FANUC 机器人与西门子 S7-1200 Profinet通讯 8 14
根据项目的需要添加通讯 I/O 的字节数(注意这里的起始地址就是跟机器人通讯的首地址) 15
PLC 输入 I 的首地址(I 68
0 开始) FANUC 机器人与西门子S7-1200 Profinet通讯 9 16
输出 Q 的首地址(Q2
0 开始) 17
转到拓扑视图连接PLC