精品文档---下载后可任意编辑第 25 卷 第 3 期桂 林 电 子 工 业 学 院 学 报V o l
25, N o
32024 年 6 月JOURNAL OF GUILIN UNIVERSITY OF ELECTRONIC TECHNOLOGY
2024谢扬球 , 谭永红 , 雷兴华 , 李若愚(桂林电子工业学院计算机系 ,广西桂林 541004)摘 要:一种实际应用于 X-Y 精密数控工作台之中的宏平台,其摈弃了减速系统,具有结构简单、摩擦阻力小、动作灵敏和扩展潜力强等特点
经试验运行 ,宏平台的技术指标 ,完全满足 X -Y 精密数控工作台系统的使用要求 ,同时也可单独用于要求大行程、中等位移精度的实际生产过程中
关键词:宏平台;机构设计;精密位移;设计指标中图分类号: T H39 文献标识码: B 文章编号: 1001-7437( 2024) 03-64-04引言大行程精密位移技术被广泛应用于半导体加工、精密制造、光学工程等领域的实际生产中 ,用以提高加工精度 ,制造出体积更小、能耗更低、功能更强大的产品
因此 ,具有 50mm 以上行程、亚微米级以下定位精度的多自由度精密位移技术已经成为相关产业的关键技术之一
针对此要求 ,近年来 ,国内外对大行程高精度位移技术进行了大量的讨论[ 1~7]
在多自由度微位移技术的讨论中存在着一个突出的矛盾: 高精度和大行程的矛盾
解决这一矛盾的关键在于设计合理的机械执行装置
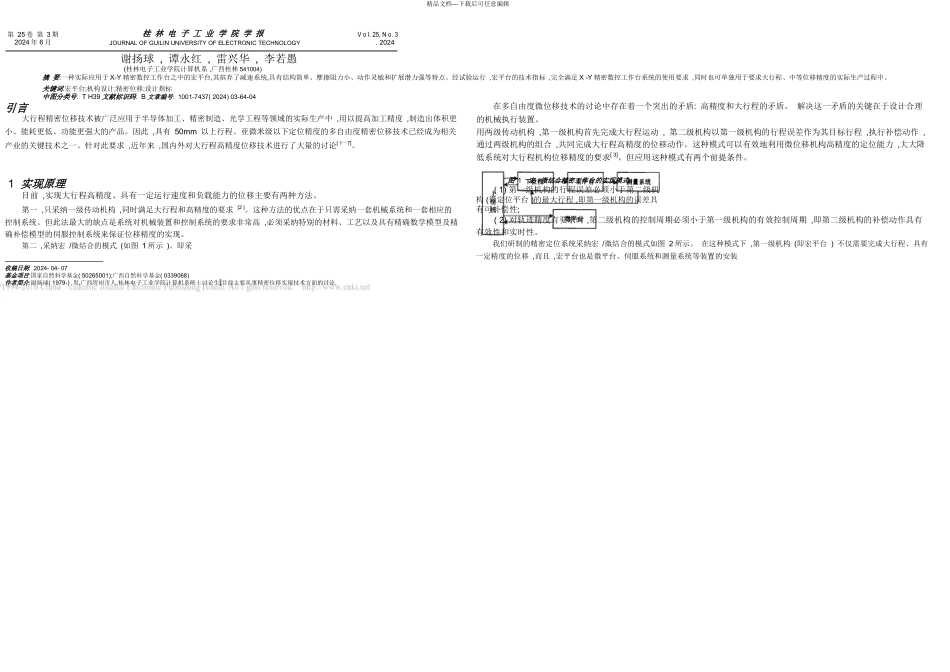
用两级传动机构 ,第一级机构首先完成大行程运动 , 第二级机构以第一级机构的行程误差作为其目标行程 ,执行补偿动作 ,通过两级机构的组合 ,共同完成大行程高精度的位移动作
这种模式可以有效地利用微位移机构高精度的定位能力 ,大大降低系统对大行程机构位移精度的要求[ 3]
但应用这种模式有两个前提条件
1 实现原理目前 ,实现大行程高精度、具有一定运行