精品文档---下载后可任意编辑鉴于目前一联合装置仪表回路自控率比较低,大部分的回路都是手动操作,这样不但增加了操作员的工作量,而且对产品质量也有一定的影响,特编制了此 PID 参数整定方法
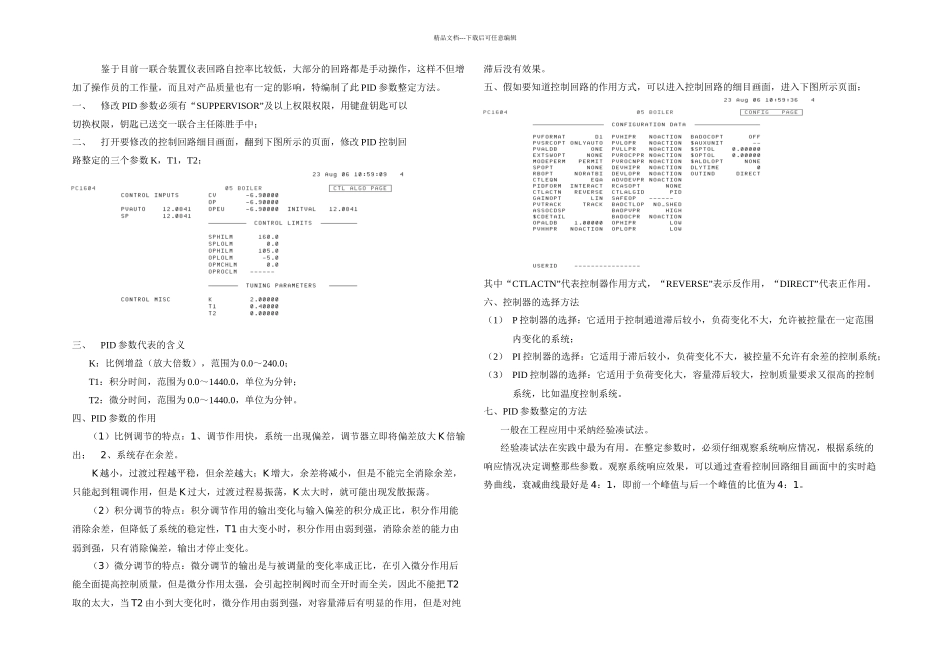
一、修改 PID 参数必须有“SUPPERVISOR”及以上权限权限,用键盘钥匙可以切换权限,钥匙已送交一联合主任陈胜手中;二、打开要修改的控制回路细目画面,翻到下图所示的页面,修改 PID 控制回路整定的三个参数 K,T1,T2;三、PID 参数代表的含义K:比例增益(放大倍数),范围为 0
0;T1:积分时间,范围为 0
0~1440
0,单位为分钟;T2:微分时间,范围为 0
0~1440
0,单位为分钟
四、PID 参数的作用(1)比例调节的特点:1、调节作用快,系统一出现偏差,调节器立即将偏差放大 K 倍输出; 2、系统存在余差
K 越小,过渡过程越平稳,但余差越大;K 增大,余差将减小,但是不能完全消除余差,只能起到粗调作用,但是 K 过大,过渡过程易振荡,K 太大时,就可能出现发散振荡
(2)积分调节的特点:积分调节作用的输出变化与输入偏差的积分成正比,积分作用能消除余差,但降低了系统的稳定性,T1 由大变小时,积分作用由弱到强,消除余差的能力由弱到强,只有消除偏差,输出才停止变化
(3)微分调节的特点:微分调节的输出是与被调量的变化率成正比,在引入微分作用后能全面提高控制质量,但是微分作用太强,会引起控制阀时而全开时而全关,因此不能把 T2取的太大,当 T2 由小到大变化时,微分作用由弱到强,对容量滞后有明显的作用,但是对纯滞后没有效果
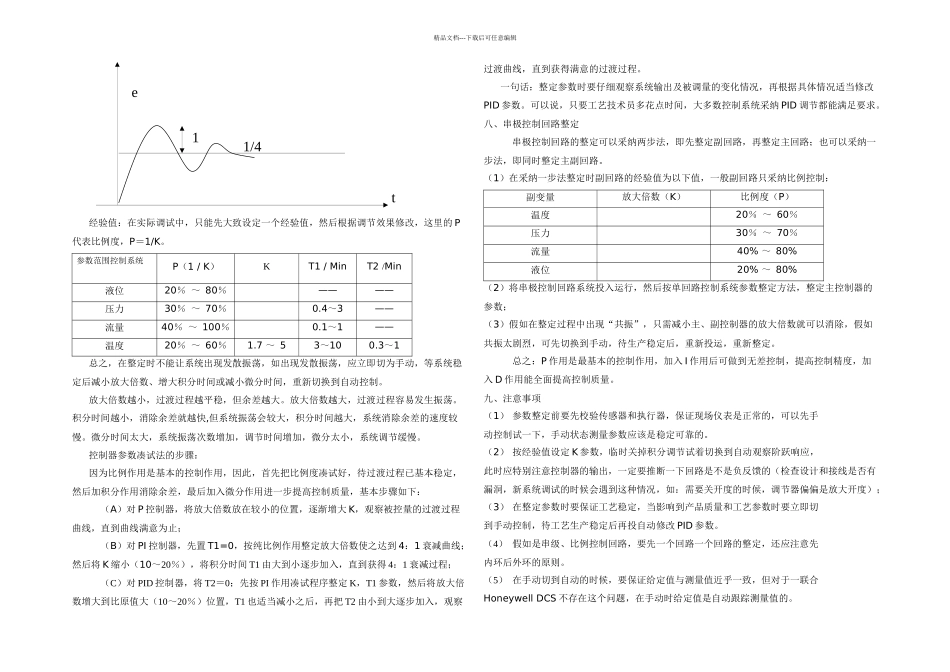
五、假如要知道控制回路的作用方式,可以进入控制回路的细目画面,进入下图所示页面:其中“CTLACTN”代表控制器作用方式,“REVERSE”表示反作用,“DIRECT”代表正作用
六、控制器的选择方法(1) P 控制器的选