精品文档---下载后可任意编辑对实际系统进行校正设计是自动控制原理课程在实际应用方面的重要内容
本例采纳根轨迹设计方法对“F-94 或 X-15 飞机的姿态控制”模拟系统进行了串联校正设计,使得该系统的时域指标满足了设计要求
一、设计过程1
2 计算机辅助设计1
1 验证人工设计通过人工设计得到如下传递函数:根据画出未加人工校正的系统根轨迹图(图 1-4)和开环波特图(图 1-5);图 1-4 未加校正的系统根轨迹图图 1-5 未加校正的系统开环波特图根据画出人工校正的开环波特图(图 1-6);根据画出人工校正后的系统根轨迹(图 1-7)、开环波特图(图 1-8)和系统阶跃响应曲线(图 1-9)
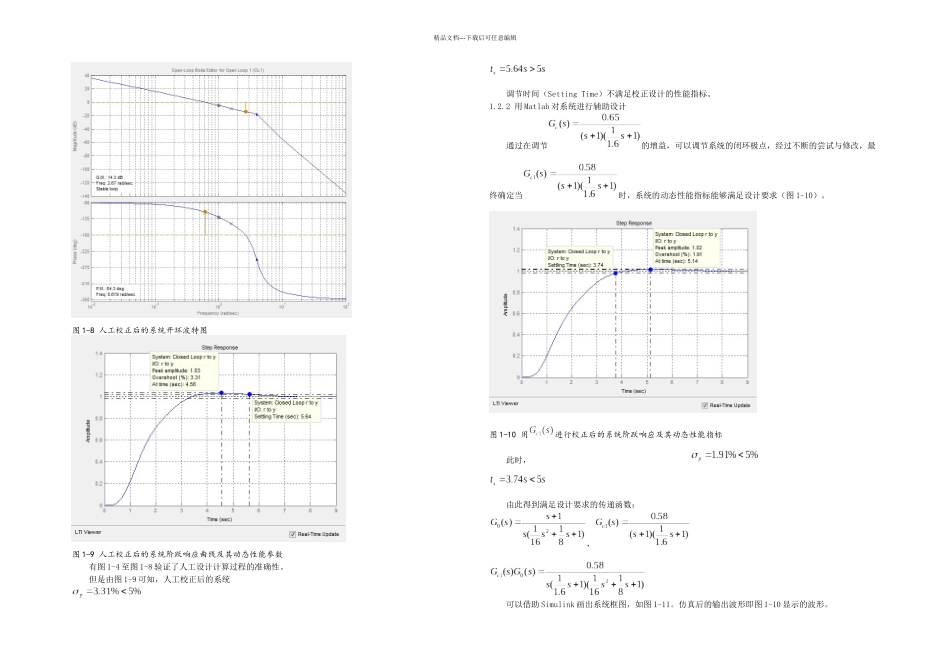
图 1-7 人工校正后的系统根轨迹精品文档---下载后可任意编辑图 1-8 人工校正后的系统开环波特图图 1-9 人工校正后的系统阶跃响应曲线及其动态性能参数有图 1-4 至图 1-8 验证了人工设计计算过程的准确性
但是由图 1-9 可知,人工校正后的系统调节时间(Setting Time)不满足校正设计的性能指标
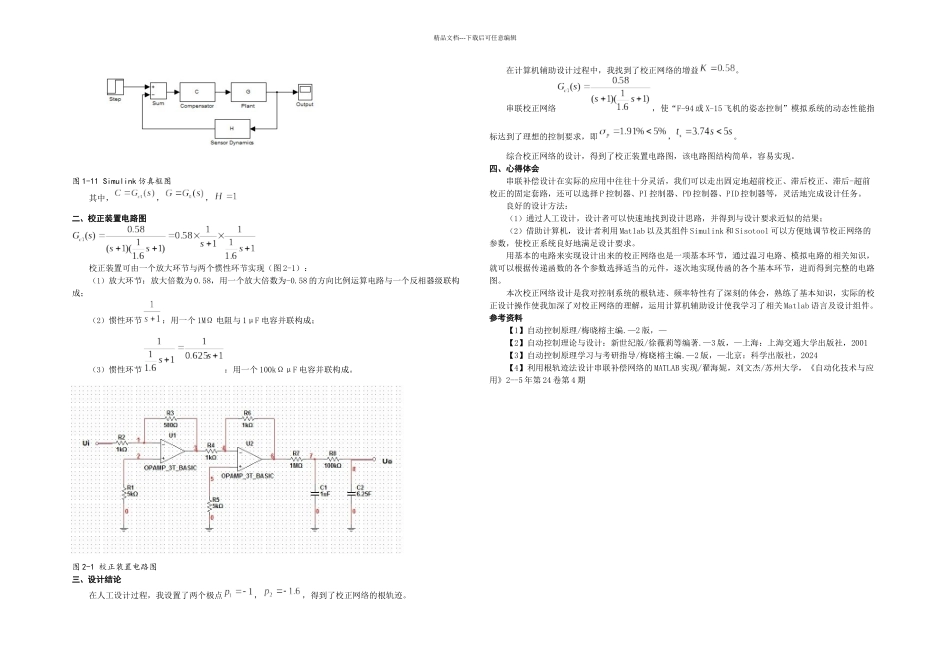
2 用 Matlab 对系统进行辅助设计通过在调节的增益,可以调节系统的闭环极点,经过不断的尝试与修改,最终确定当时,系统的动态性能指标能够满足设计要求(图 1-10)
图 1-10 用进行校正后的系统阶跃响应及其动态性能指标此时,由此得到满足设计要求的传递函数:,可以借助 Simulink 画出系统框图,如图 1-11
仿真后的输出波形即图 1-10 显示的波形
精品文档---下载后可任意编辑图 1-11 Simulink 仿真框图其中,,,二、校正装置电路图校正装置可由一个放大环节与两个惯性环节实现(图 2-1):(1)放大环节:放大倍数为 0
58,用一个放大倍数为-0
58 的方向比例运算电路与一个反相器级联构成;(2)惯性环节:用一个 1MΩ 电