改进同步电机转矩控制精度的措施 自 20世纪 60年代末以来,面向磁场的矢量控制一直是交流电机控制的主流
这样的控制方法的主要特点是对电机气隙和转矩进行分开控制
对于永磁同步电机,典型的控制设计就是考虑恒定的磁通会产生一个转矩常数 kt,该常数在大多数电机的技术手册中都能找到
获得需要的转矩 m所对应的电流 iq也由此计算得到
但是,输出转矩和相应的电流 iq之间的这种恒定关系的可信度很容易受到各种各样的实际因素的负面影响,这样的影响很容易产生转矩控制中所不能接受的精度偏差
一些容易影响的实际因素如下: ●产品出厂过程与材料的老化; ●铁心材料在过载时饱和; ●磁阻转矩变化; ●电枢(磁性材料)的温度
磁材料(磁介质)的分散性导致的实际转矩常数与数据手册上的数值偏差可能会超过 5%
更严重的是通过观察发现,经过一段较长时间,永磁电机的磁场会下降几个百分点
由于这样的变化通常十分缓慢,一种电机离线参数辨识(将在“一种电机模型的预辨识系统”部分中讨论)将解决这一问题
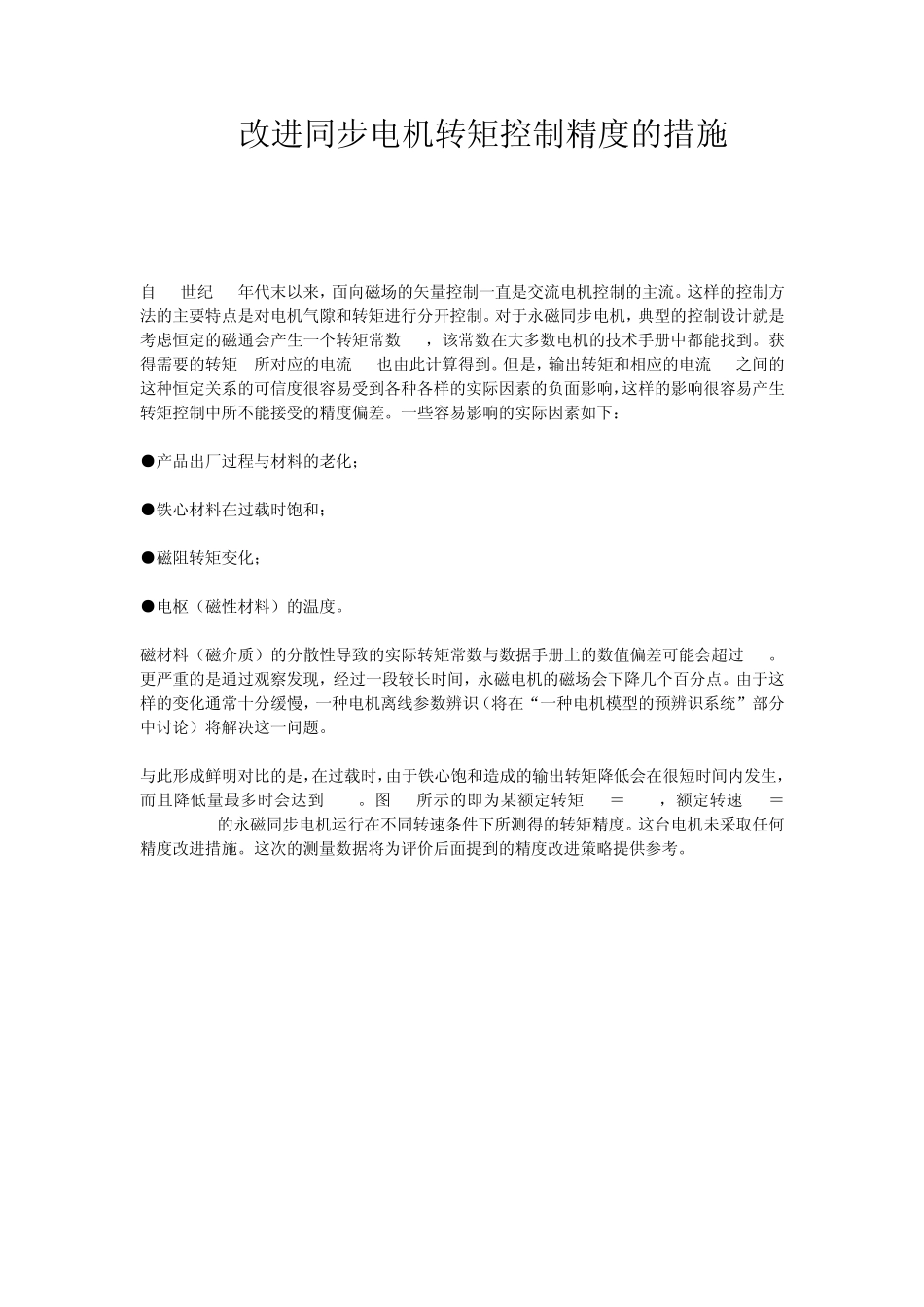
与此形成鲜明对比的是,在过载时,由于铁心饱和造成的输出转矩降低会在很短时间内发生,而且降低量最多时会达到 20%
图 1所示的即为某额定转矩 mn=23nm,额定转速 nn=2000r/min的永磁同步电机运行在不同转速条件下所测得的转矩精度
这台电机未采取任何精度改进措施
这次的测量数据将为评价后面提到的精度改进策略提供参考
图1 转矩精度(对比参照) 实验数据是通过图2所示的测试装置采集到的
图中右侧的被测试电机运行在转矩控制模式下,而左侧的负载电机运行在速度控制模式下
两个电机通过一个转矩测量轴耦合
图2 转矩测量装置 实际的两台电机在设置点 mset=0nm处的相对转矩要从被测试电机上的所测的转矩曲线中减去
因为这一转矩在后来的研究中被当作是对运行中的摩擦转矩所抵消
而且,除了黏性摩擦之外的其他因素