2 步进电动机位置控制系统 10
2 步进电动机的脉冲分配电路 1
硬件脉冲分配器电路 步进电动机的脉冲分配可以由硬件和软件两种方法来实现
硬件环形分配器需要根据步进电动机的相数和要求的通电方式而设计专门的电路,图10
6 所示为一个三相六拍的环形分配器
分配器的主体是三个J-K 触发器
三个J-K 触发器的Q 输出端分别经各自的功放线路与步进电动机A、B、C 三相绕组连接
当 QA=1 时,A 相绕组通电;QB=1 时,B 相绕组通电;QC=1 时,C 相绕组通电
DR+和DR-是步进电动机的正反转控制信号
正转时,各相通电顺序:A-AB-B-BC-C-CA 反转时,各相通电顺序:A-AC-C-CB-B-BA 图10
6 三相六拍环形分配器 图10
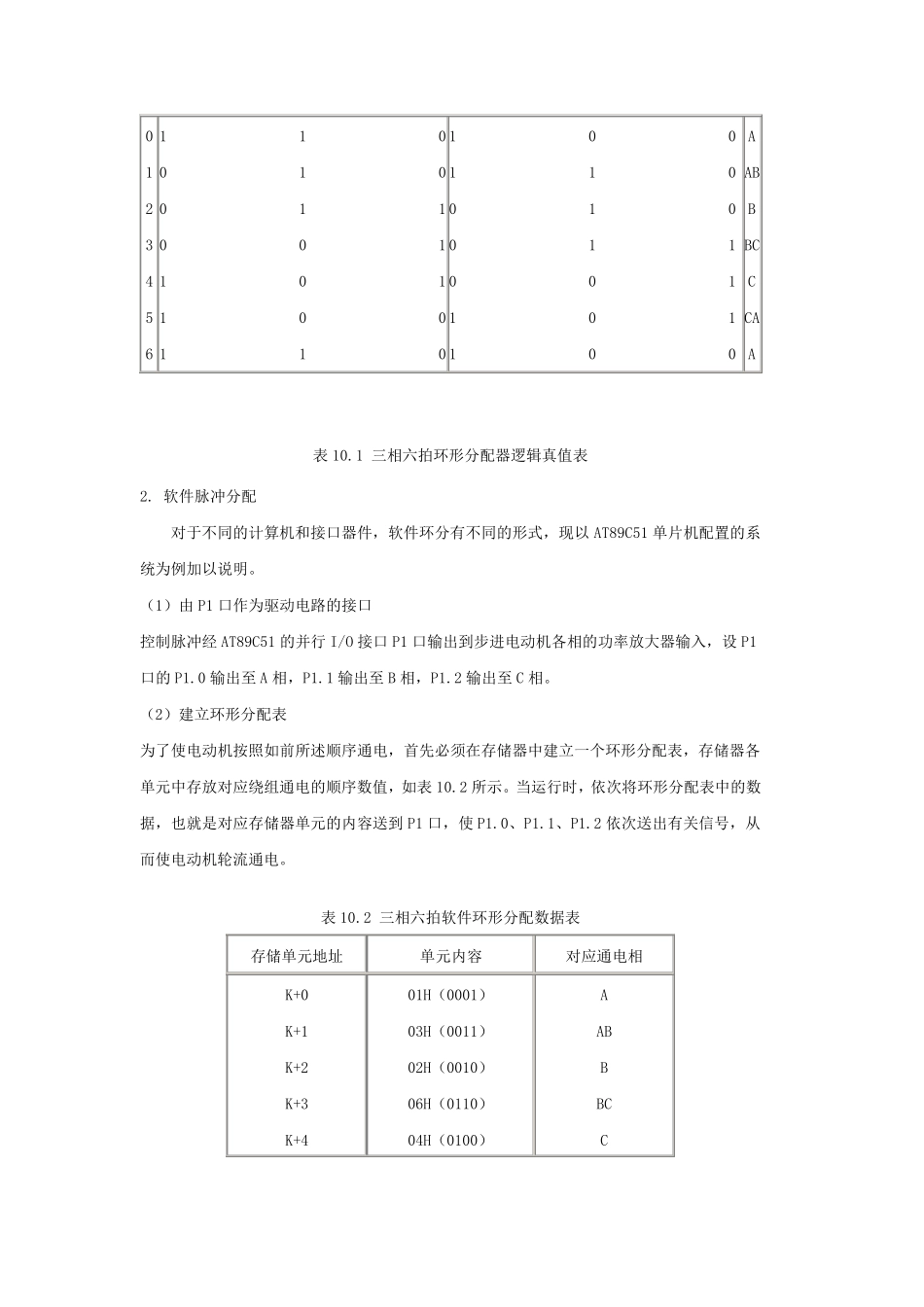
6 所示为的三相六拍环形分配器逻辑真值表如表 10
序号 控制信号状态 输出状态 导电绕组 0 1 2 3 4 5 6 1 1 0 0 1 0 0 1 1 0 0 1 1 0 1 1 0 0 1 1 0 1 0 0 1 1 0 0 1 0 0 1 1 0 0 1 1 0 1 1 0 0 A AB B BC C CA A 表10
1 三相六拍环形分配器逻辑真值表 2
软件脉冲分配 对于不同的计算机和接口器件,软件环分有不同的形式,现以AT89C51 单片机配置的系统为例加以说明
(1)由P1 口作为驱动电路的接口 控制脉冲经AT89C51 的并行I/O 接口P1 口输出到步进电动机各相的功率放大器输入,设P1口的P1
0 输出至A 相,P1
1 输出至B 相,P1
2 输出至C 相
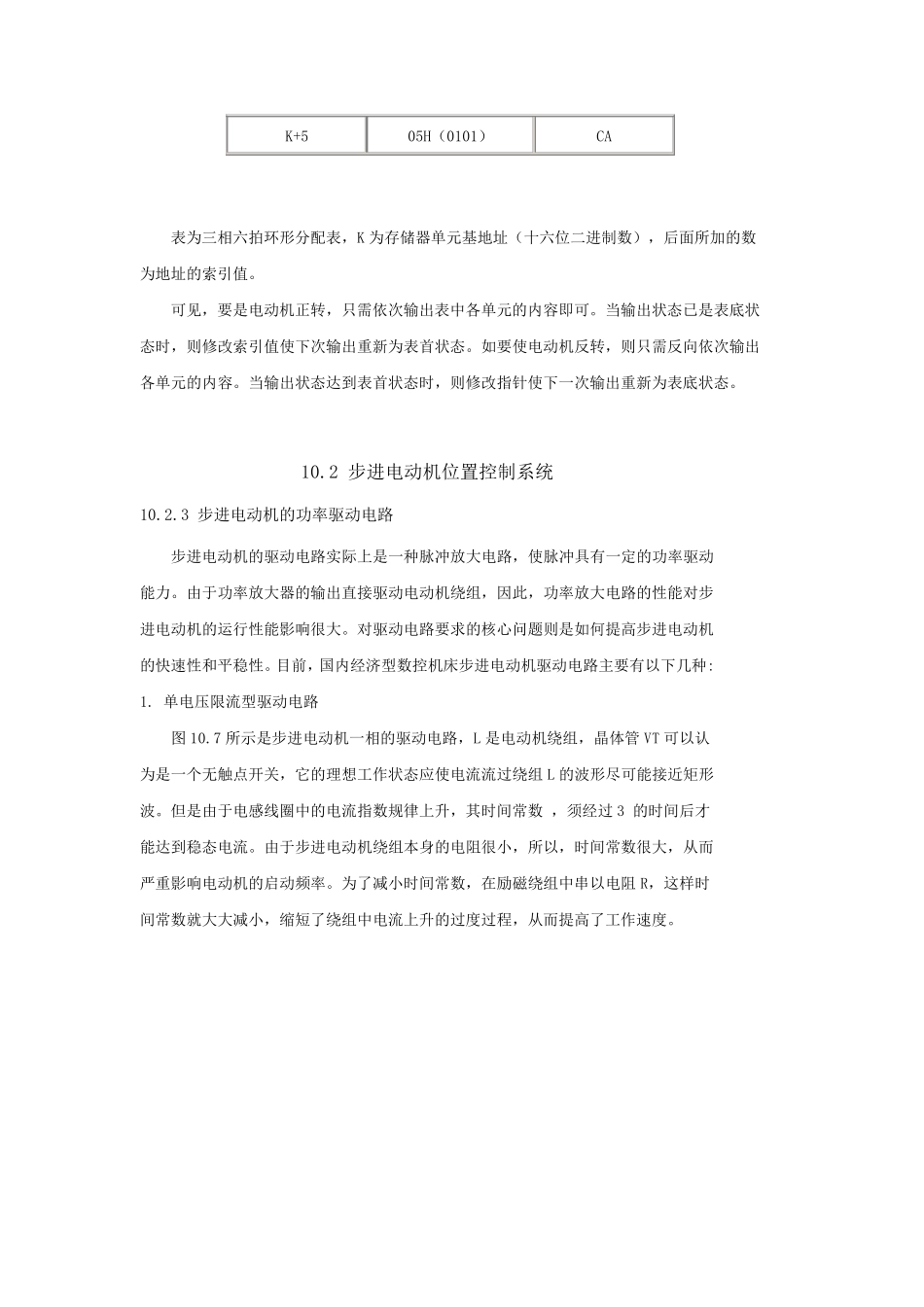
(2)建立环形分配表 为了使电动机按照如前所述顺序通电,首先必须在存储器中建立一个环形分配表,存储器各单元中存放对应绕组通电的顺序数值,如表10
当运行时,依次将环形分配表中的数据,也就是对应存储器单元的内