自适应可翻转探测车 首先搜集了大量的资料,对目前世界上的探测车研制情况有了一个大体的了解,然后结合自己的创意,列出了一系列的方案,经过认真的讨论和试验,最终确定了参赛方案
在方案中,四面可翻转是一个灵魂,无论怎么将车设计成什么样子,这一个功能是不变的
至于其它的如无线遥控,人工智能,太阳能供电,只是在此基础上的一个运用,大方向是不变的
对于所确定的机构,传动是一个比较棘手的问题
因为无论是链传动还是带传动都会涉及到动力传递时的效率和标准件的购买问题
最后决定不用链传动和带传动,靠电机通过轴直接传动
虽然这样的设计会增加电机的个数(每个轮子由一个电机带动),但它比用标准件的优点在于可以提高传动效率,减轻整车的重量,可靠性增强
电机传动如图 1 所示: 图 1 电机传动方式 1 这种传动方式由于加工误差等问题,电机轴和传动轴的同轴度问题无法解决,并且出现了在传动轴另一端出现圆锥摆动的情况
于是又改为如下方案(见图 2 ): 图 2 电机传动方式 2 虽然这解决了圆锥摆的问题,但是由于加工误差同轴度问题始终没有得到很好的解决
而且在传动时,电机提供力拒的同时还会产生一个和力 F 近似相等的力,这个力将使传动轴的轴线作圆周运动,所以第一代车的传动效率是比较差的,以至于出现动力不足的问题
因此,如果想电机直接传动,最好不要用以上两种传动方式
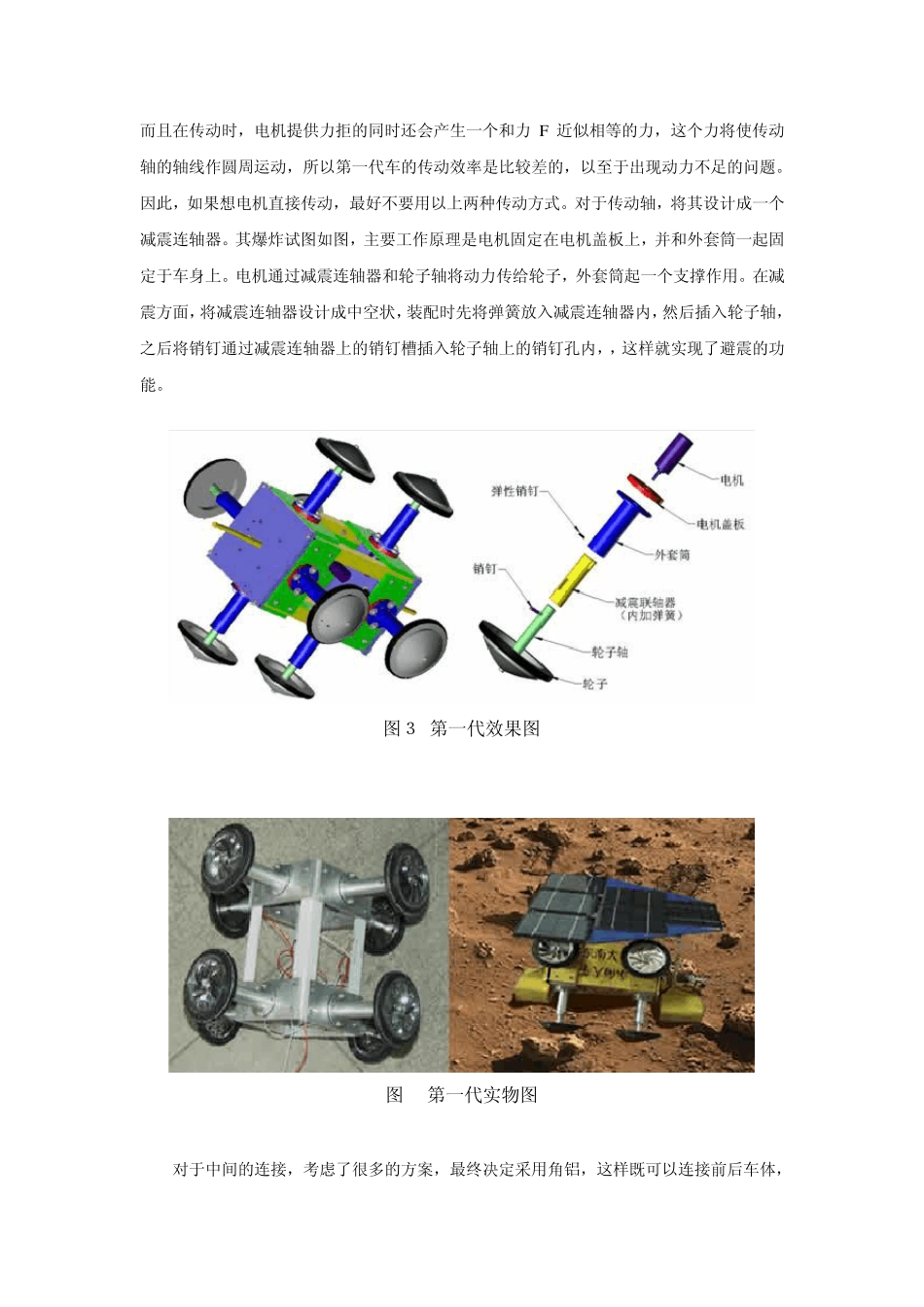
对于传动轴,将其设计成一个减震连轴器
其爆炸试图如图,主要工作原理是电机固定在电机盖板上,并和外套筒一起固定于车身上
电机通过减震连轴器和轮子轴将动力传给轮子,外套筒起一个支撑作用
在减震方面,将减震连轴器设计成中空状,装配时先将弹簧放入减震连轴器内,然后插入轮子轴,之后将销钉通过减震连轴器上的销钉槽插入轮子轴上的销钉孔内,,这样就实现了避震的功能
图3 第一代效果图 图 4 第一代实物图 对于中间的连接,考虑了很多的方案,最终决定采用角铝,