一 运动指令 M o ve JMo veJ[\Conc,]T o P oi nt,Sp e e d[\V]│[\T],Z one[\Z][\Inpos],Tool[\W O bj];1 [\C o nc,]:协作运动开关
(s witch)2 ToPoi nt:目标点,默认为*
(r o b otarget)3 S pee d:运行速度数据
(speedda t a)4 [\V]:特别运行速度 m m/s
(nu m)5 [\T]:运行时间控制 s
(num)6 Zone:运行转角数据
(zonedat a)7 [\Z]:特别运行转角m m
(num)8 [\I n p os]:运行停止点数据
(sto pp ointd ata)9 Tool:工具中心点(TCP)
(too l data)10 [\W O b j]:工件坐标系
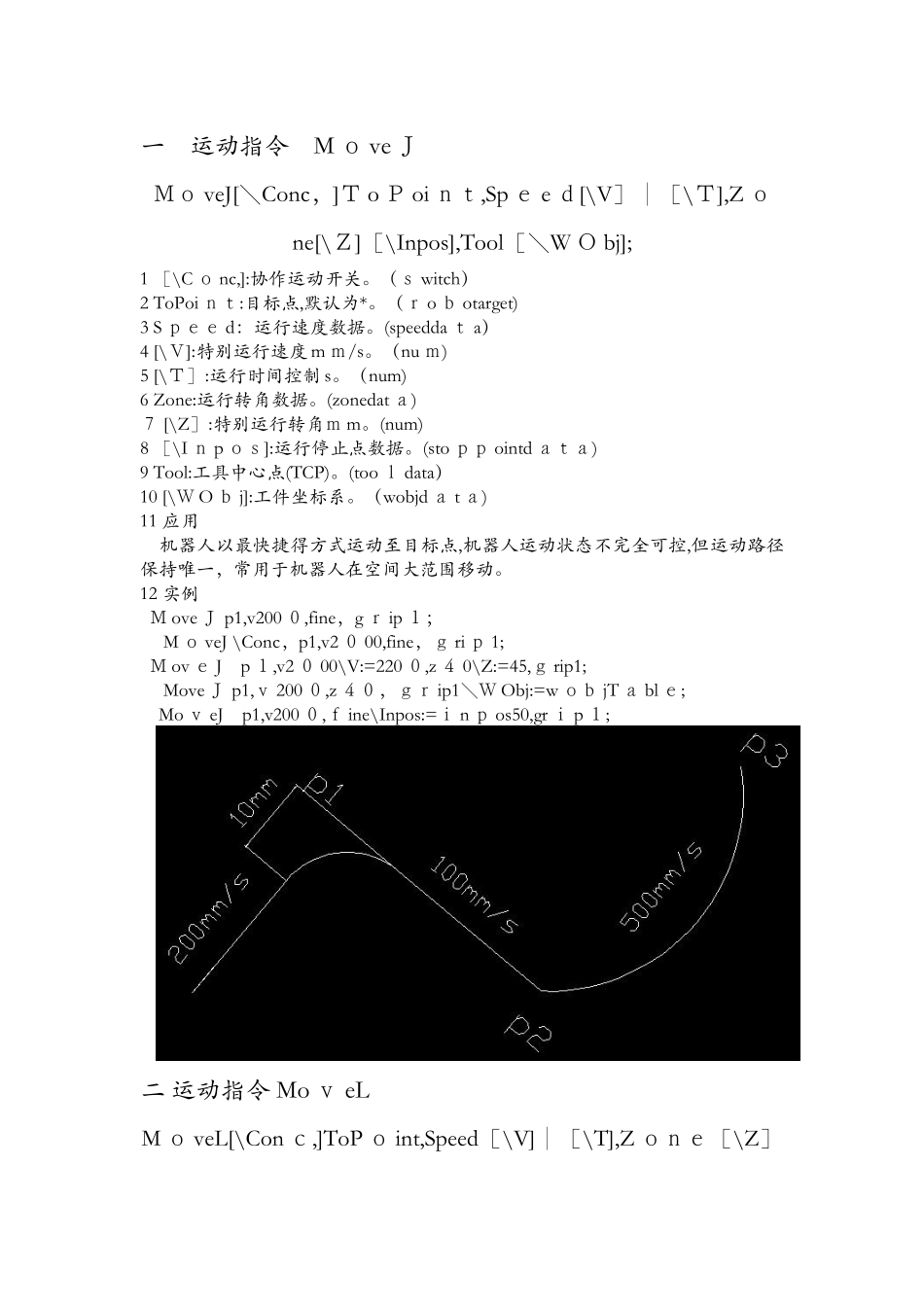
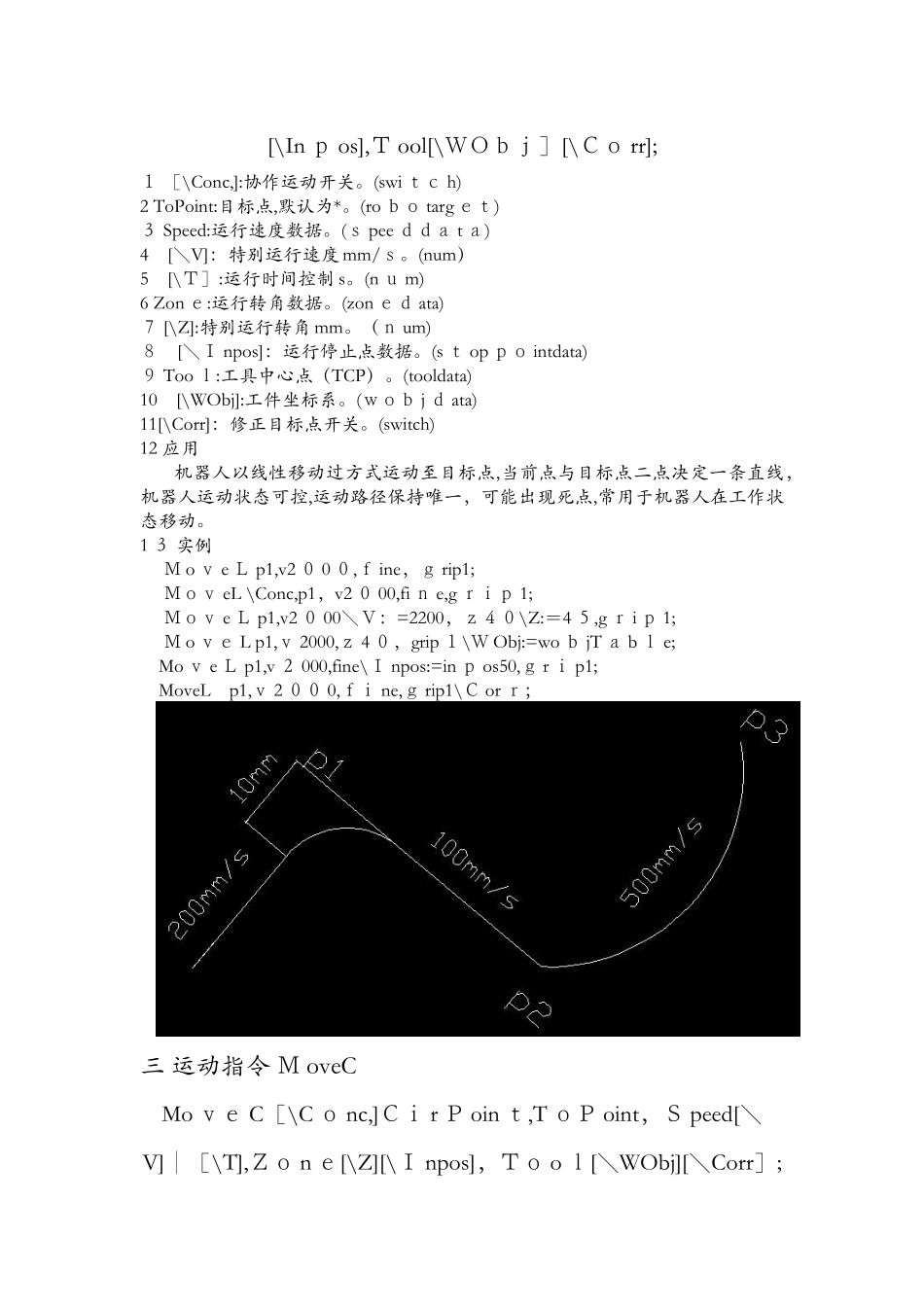
(wobjd a t a)11 应用 机器人以最快捷得方式运动至目标点,机器人运动状态不完全可控,但运动路径保持唯一,常用于机器人在空间大范围移动
12 实例 M ove J p1,v200 0,fine,g r ip 1; M o veJ \Conc,p1,v2 0 00,fine,g ri p 1; M ov e J p 1,v2 0 00\V:=220 0,z 4 0\Z:=45,g rip1; Move J p1,v 200 0,z 40,gr ip1\W Obj:=w ob jT a bl e;Mo v eJ p1,v200 0,f ine\Inpos:=i n p os50,gr i p 1;二 运动指令 Mo v eLM o veL[\Con c,]ToP o int,Speed[\V]│[\T],Z one[\Z][\In p os],T ool[\WObj][\Co rr];1 [\Conc,]:协作运动开关
(swi tc h)2