1齐齐哈尔大学大学普通高等教育综合实践设计题目:差速器设计及驱动半轴设计学院:机电工程学院专业班级:机械082班学生姓名:姜巍学号:2008111016指导教师:刘尚成绩:时间:2010年11月15日2目录1基本数据⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯32普通圆锥齿轮差速器设计⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯32
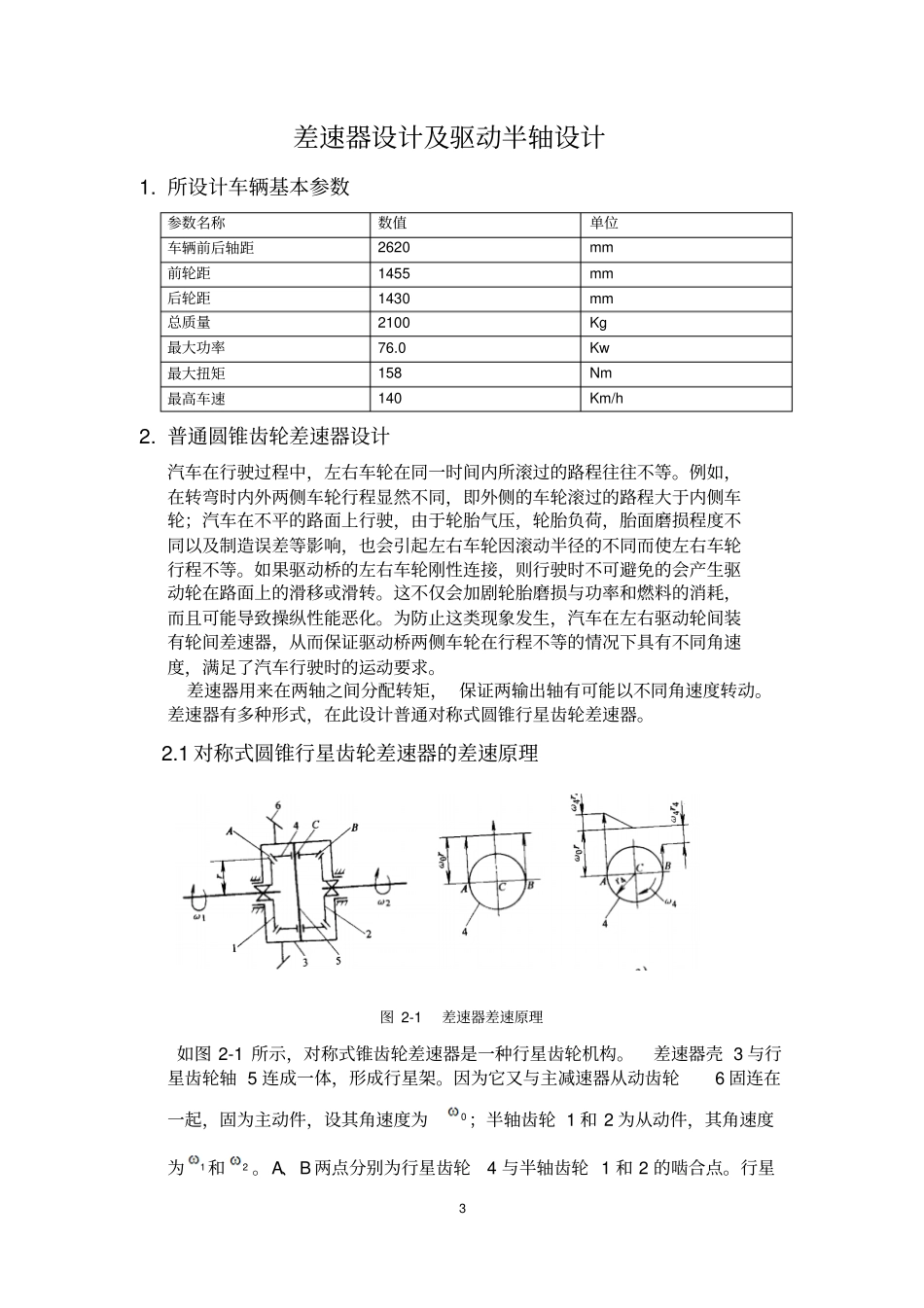
1对称式圆锥行星齿轮差速器的差速原理⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯32
2对称式圆锥行星齿轮差速器的结构⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯42
3对称式圆锥行星齿轮差速器的设计和计算⋯⋯⋯⋯⋯⋯⋯⋯⋯42
1差速器齿轮的基本参数的选择⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯42
2差速器齿轮的几何计算⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯72
3差速器齿轮的强度计算⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯92
4差速器齿轮的材料⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯103驱动半轴的设计⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯103
1结构形式分析⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯103
2半浮式半轴杆部半径的确定⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯103
3半轴花键的强度计算⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯123
4半轴其他主要参数的选择⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯123
5半轴的结构设计及材料与热处理⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯134
参考文献⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯133差速器设计及驱动半轴设计1
所设计车辆基本参数参数名称数值单位车辆前后轴距2620mm前轮距1455mm后轮距1430mm总质量2100Kg最大功率76
0Kw最大扭矩158Nm最高车速140Km/h2
普通圆锥齿轮差速器设计汽车在行驶过程中,左右车轮在同一时间内所滚过的路程往往不等
例如,在转弯时内外两侧车轮