1位置随动系统的结构与工作原理位置随动系统的结构组成位置随动系统的原理图如图1-1
该系统的作用是使负载J(工作机械)的角位移随给定角度的变化而变化,即要求被控量复现控制量
系统的控制任务是使工作机械随指令机构同步转动即实现:Q(c)=Q(r)系统系统主要由以下部件组成:系统中手柄是给定元件,手柄角位移Qr是给定值(参考输入量),工作机械是被控对象,工作机械的角位移Qc是被控量(系统输出量),电桥电路是测量和比较元件,它测量出系统输入量和系统输出量的跟踪偏差(Qr-Qc)并转换为电压信号Us,该信号经可控硅装置放大后驱动电动机,而电动机和减速器组成执行机构
系统的工作原理控制系统的任务是控制工作机械的角位移Qc跟踪输入手柄的角位移Qr
如图1-1,当工作机械的转角Qc与手柄的转角Qr一致时,两个环形电位器组成的桥式电路处于平衡状态
其输出电压Us=0,电动机不动,系统处于平衡状态
当手柄转角Qr发生变化时,若工作机械仍处于原来的位置不变,则电桥输出电压Us不等于0,此电压信号经放大后驱动电动机转动,并经减速器带动工作机械使角位移Qc向Qr变化的方向转动,并逐渐使Qr和Qc的偏差减小
当Qc二Qr时,电桥的输出电压为0,电机停转,系统达到新的平衡状态
当Qr任意变化时,控制系统均能保证Qc跟随Qr任意变化,从而实现角位移的跟踪目的
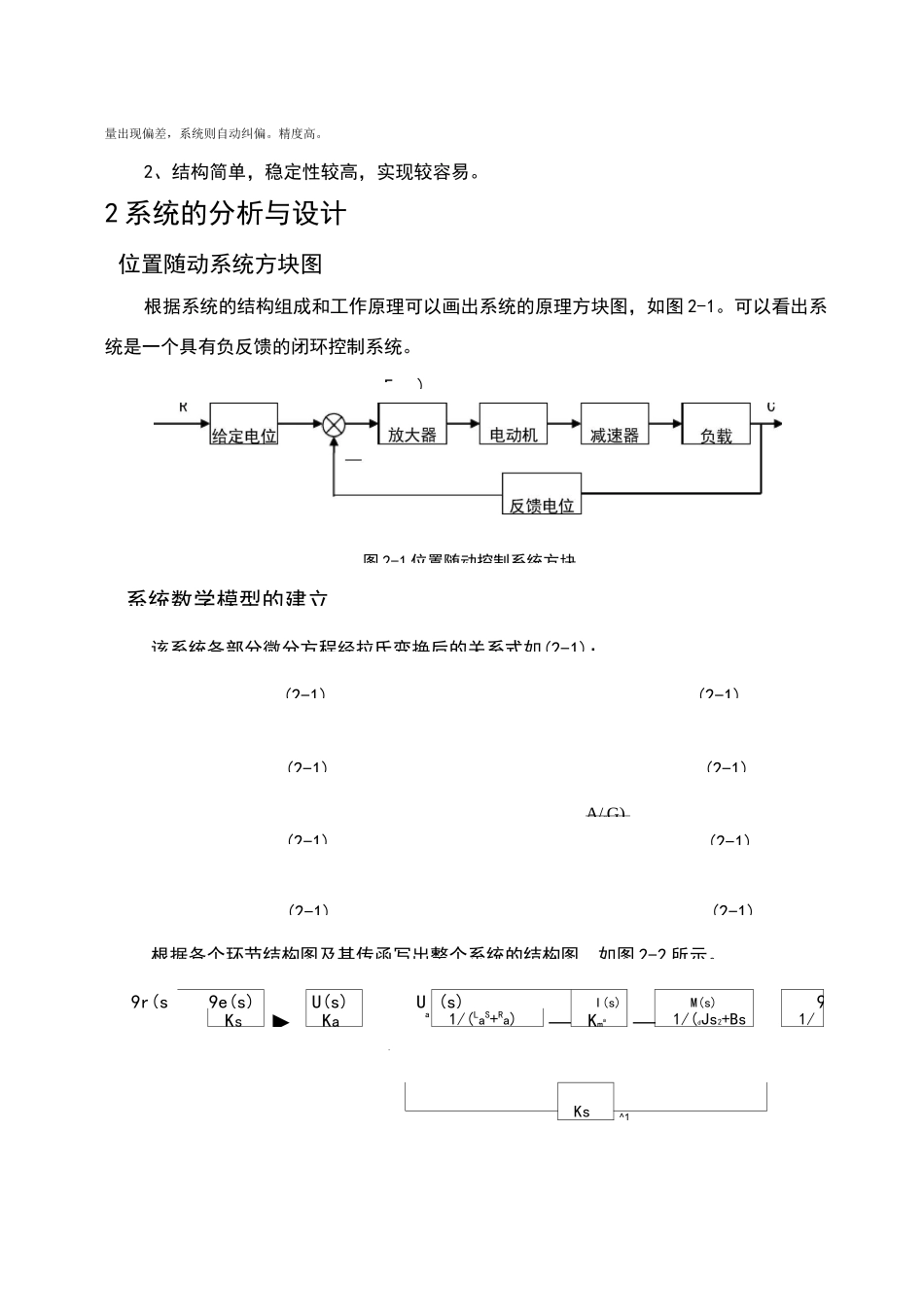
该系统的特点:1、无论是由干扰造成的,还是由结构参数的变化引起的,只要被控系统数学模型的建立该系统各部分微分方程经拉氏变换后的关系式如(2-1):(2-1)(2-1)(2-1)(2-1)A/rG)(2-1)(2-1)(2-1)(2-1)9r(s9e(s)U(s)U(s)I(s)M(s)9Ks►Kaa1/(LaS+Ra)—Kma—1/(dJs2+Bs1/Ks^1量出现偏差,系统则自动纠偏
2、结构简单,稳定性较高,实现较容易
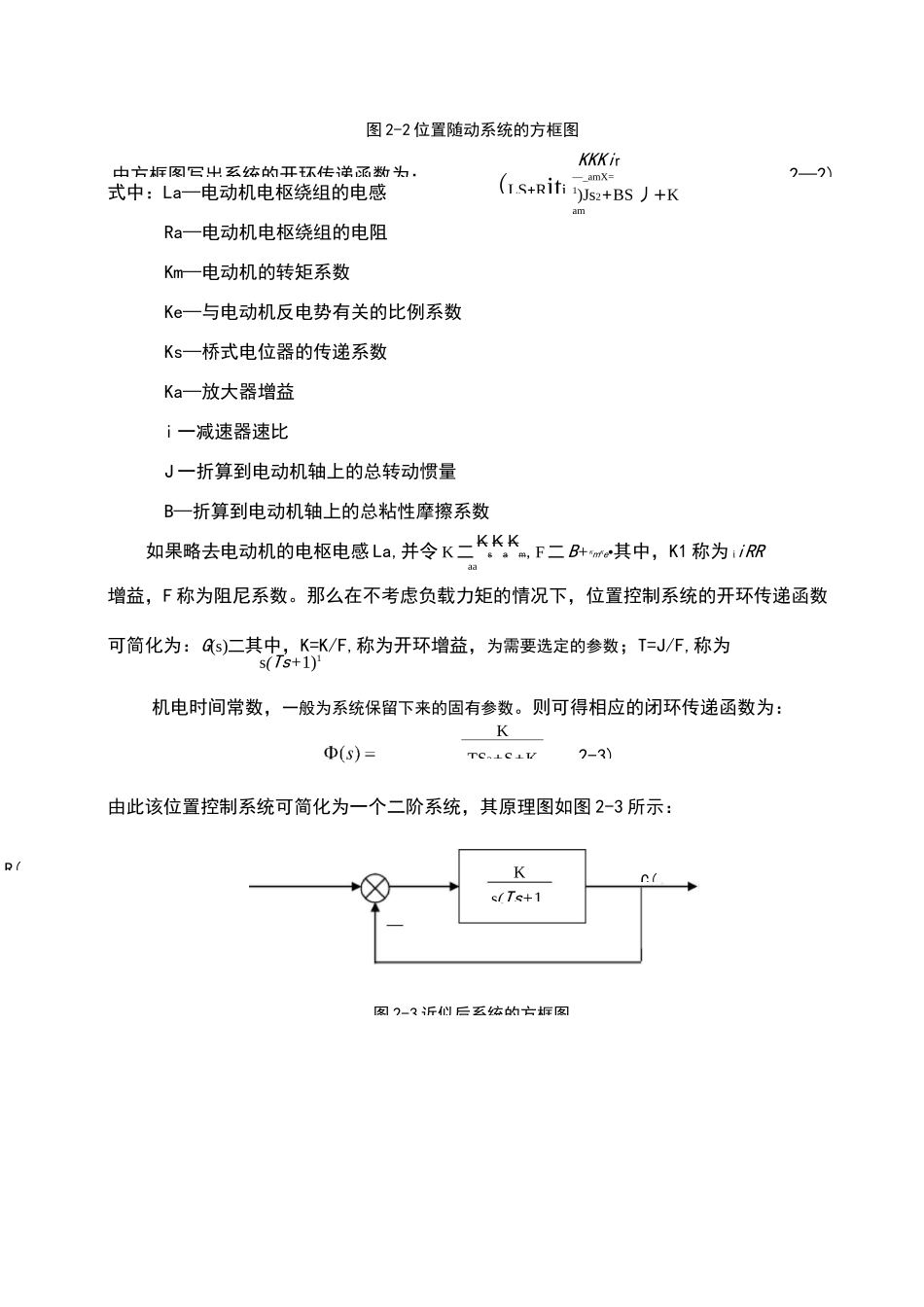
2系统的分析与设